#include <visp3/ustk_core/usImageRF3D.h>
 Inheritance diagram for usImageRF3D< Type >:
Inheritance diagram for usImageRF3D< Type >: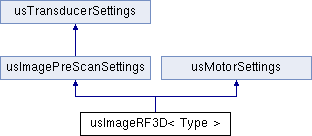
Public Types | |
| enum | usMotorType { LinearMotor = 0 , TiltingMotor = 1 , RotationalMotor = 2 } |
Public Member Functions | |
| usImageRF3D () | |
| usImageRF3D (unsigned int height, unsigned int width, unsigned int numberOfFrames) | |
| usImageRF3D (unsigned int height, unsigned int width, unsigned int numberOfFrames, const usImagePreScanSettings &imageSettings, const usMotorSettings &motorSettings) | |
| usImageRF3D (const usImageRF3D< Type > &other) | |
| virtual | ~usImageRF3D () |
| void | getFrame (usImageRF2D< Type > &image, unsigned int index) const |
| const Type * | getConstData () const |
| unsigned int | getWidth () const |
| unsigned int | getHeight () const |
| unsigned int | getNumberOfFrames () const |
| unsigned int | getRFSampleNumber () const |
| unsigned int | getSize () const |
| void | insertFrame (const usImageRF2D< short > &frame, unsigned int index) |
| usImageRF3D< Type > & | operator= (const usImageRF3D< Type > &other) |
| bool | operator== (const usImageRF3D< Type > &other) |
| Type | operator() (unsigned int i, unsigned int indexJ, unsigned int k) const |
| void | operator() (unsigned int i, unsigned int indexJ, unsigned int k, const Type &value) |
| void | setFrameNumber (unsigned int frameNumber) |
| void | setScanLineNumber (unsigned int scanLineNumber) |
| void | resize (unsigned int height, unsigned int width, unsigned int numberOfFrames) |
Inherited functionalities from usImagePreScanSettings | |
| double | getAxialResolution () const |
| usImagePreScanSettings | getImagePreScanSettings () const |
| bool | operator== (const usImagePreScanSettings &other) |
| void | setAxialResolution (const double axialResolution) |
| void | setImagePreScanSettings (const usImagePreScanSettings &preScanSettings) |
Inherited functionalities from usTransducerSettings | |
| bool | operator== (usTransducerSettings const &other) |
| double | getDepth () const |
| double | getFieldOfView () const |
| std::string | getProbeName () const |
| int | getSamplingFrequency () const |
| unsigned int | getScanLineNumber () const |
| double | getScanLinePitch () const |
| double | getTransducerRadius () const |
| usTransducerSettings | getTransducerSettings () const |
| int | getTransmitFrequency () const |
| bool | isTransducerConvex () const |
| bool | operator!= (usTransducerSettings const &other) |
| bool | scanLineNumberIsSet () const |
| void | setDepth (double depth) |
| void | setFieldOfView (double fieldOfView) |
| void | setProbeName (std::string probeName) |
| void | setSamplingFrequency (const int samplingFrequency) |
| void | setScanLinePitch (const double scanLinePitch) |
| void | setTransducerConvexity (const bool isTransducerConvex) |
| void | setTransducerSettings (const usTransducerSettings &other) |
| void | setTransducerRadius (const double transducerRadius) |
| void | setTransmitFrequency (const int transmitFrequency) |
Inherited functionalities from usMotorSettings | |
| unsigned int | getFrameNumber () const |
| double | getFramePitch () const |
| double | getMotorFieldOfView () const |
| double | getMotorRadius () const |
| usMotorSettings | getMotorSettings () const |
| usMotorType | getMotorType () const |
| bool | frameNumberIsSet () const |
| bool | operator== (const usMotorSettings &other) |
| bool | operator!= (const usMotorSettings &other) |
| void | setFramePitch (double framePitch) |
| void | setMotorFieldOfView (double motorFieldOfView) |
| void | setMotorRadius (double motorRadius) |
| void | setMotorSettings (const usMotorSettings &other) |
| void | setMotorType (const usMotorType &motorType) |
Friends | |
| class | usRawFileParser |
Detailed Description
template<class Type>
class usImageRF3D< Type >
3D Radio Frequence (RF) ultrasound image.
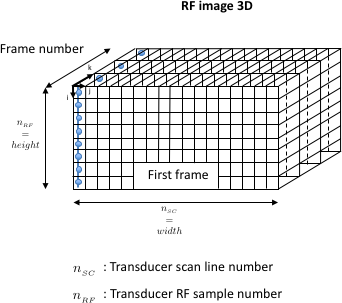
This class represents a 3D RF ultrasound image. This image is nothing more than voxel container that contains 3D RF data and additional settings that give information about the acquisition process.
The settings associated to an usImageRF3D image are the:
- pre-scan image settings implemented in usImagePreScanSettings that are:
- the name of the probe that could be set using setProbeName() or retrieved using getProbeName().
- the transducer radius
 in meters (value set to zero for a linear transducer). Its value could be set using setTransducerRadius() and retrieved using getTransducerRadius().
in meters (value set to zero for a linear transducer). Its value could be set using setTransducerRadius() and retrieved using getTransducerRadius(). - the scan line pitch that corresponds to the angle
 (in radians) between two successive scan line beams when the transducer is convex, or to the distance
(in radians) between two successive scan line beams when the transducer is convex, or to the distance  (in meters) when the transducer is linear. To set this value use setScanLinePitch() and to get its value use getScanLinePitch().
(in meters) when the transducer is linear. To set this value use setScanLinePitch() and to get its value use getScanLinePitch(). - the number of scan lines
 . To set this setting use setScanLineNumber() and to access to the value use getScanLineNumber().
. To set this setting use setScanLineNumber() and to access to the value use getScanLineNumber(). - the type of ultrasound transducer used for data acquisition: convex or linear. This parameter could be set using setTransducerConvexity(). To know the transducer type use isTransducerConvex().
- the depth that corresponds to the distance in meters between the first and the last pixel in a scan line. To set this value use setDepth() and to get the depth use getDepth().
- an additional axial resolution parameter called
 which corresponds to the distance (in meters) between two consecutive RF samples along a scan line. To set this value use setAxialResolution() and to retrieve this value use getAxialResolution().
which corresponds to the distance (in meters) between two consecutive RF samples along a scan line. To set this value use setAxialResolution() and to retrieve this value use getAxialResolution().
- the motor settings implemented in usMotorSettings that are:
- the type of motor used to move the transducer: linear, tilting (small rotation) or rotationnal (360° rotation). This type is defined in usMotorType and could be set using setMotorType(). To retrieve the motor type use getMotorType().
- the motor radius
 (value set to zero for a linear motor). This value could be set using setMotorRadius() or get using getMotorRadius().
(value set to zero for a linear motor). This value could be set using setMotorRadius() or get using getMotorRadius(). - the frame pitch that corresponds to the angle
 (in radians) between to successive frame acquisitions when the motor is convex, or to the distance
(in radians) between to successive frame acquisitions when the motor is convex, or to the distance  (in meters) when the motor is linear. To set this value use setFramePitch() and to access use getFramePitch().
(in meters) when the motor is linear. To set this value use setFramePitch() and to access use getFramePitch(). - the frame number
 that corresponds to the number of frames acquired by the probe to generate the 3D volume. This number is set using setFrameNumber() and could be retrieved using getFrameNumber().
that corresponds to the number of frames acquired by the probe to generate the 3D volume. This number is set using setFrameNumber() and could be retrieved using getFrameNumber().
The following figure summarize these settings and shows the structure of an usImageRF3D image:
The following example shows how to build a 3D RF ultrasound image, and set the acquisiton settings.
- Examples
- testUsImageRf3DMhdParser.cpp.
Definition at line 135 of file usImageRF3D.h.
Member Enumeration Documentation
◆ usMotorType
|
inherited |
Enumerator for motor type
| Enumerator | |
|---|---|
| LinearMotor | Case of a linear motor. |
| TiltingMotor | Case of a tilting motor (small rotation). |
| RotationalMotor | Case of a roatational motor (360° rotation). |
Definition at line 81 of file usMotorSettings.h.
Constructor & Destructor Documentation
◆ usImageRF3D() [1/4]
| usImageRF3D< Type >::usImageRF3D |
Basic constructor.
Definition at line 188 of file usImageRF3D.h.
◆ usImageRF3D() [2/4]
| usImageRF3D< Type >::usImageRF3D | ( | unsigned int | height, |
| unsigned int | width, | ||
| unsigned int | numberOfFrames | ||
| ) |
Basic constructor.
Definition at line 198 of file usImageRF3D.h.
References usImageRF3D< Type >::resize().
◆ usImageRF3D() [3/4]
| usImageRF3D< Type >::usImageRF3D | ( | unsigned int | height, |
| unsigned int | width, | ||
| unsigned int | numberOfFrames, | ||
| const usImagePreScanSettings & | preScanSettings, | ||
| const usMotorSettings & | motorSettings | ||
| ) |
Full initializing constructor.
- Parameters
-
height Image height. width Image width. numberOfFrames Number of frames in volume. preScanSettings Pre-scan settings to copy. motorSettings Motor settings to copy.
Definition at line 214 of file usImageRF3D.h.
References usMotorSettings::getFrameNumber(), and usTransducerSettings::getScanLineNumber().
◆ usImageRF3D() [4/4]
| usImageRF3D< Type >::usImageRF3D | ( | const usImageRF3D< Type > & | other | ) |
Copy constructor.
- Parameters
-
other 3D RF image to copy.
Definition at line 232 of file usImageRF3D.h.
References usImageRF3D< Type >::getConstData(), usImageRF3D< Type >::getHeight(), usImageRF3D< Type >::getNumberOfFrames(), and usImageRF3D< Type >::getWidth().
◆ ~usImageRF3D()
|
virtual |
Destructor.
Definition at line 243 of file usImageRF3D.h.
Member Function Documentation
◆ frameNumberIsSet()
|
inherited |
Getter to know if the scan frame is set (usefull in case of field of view setter call).
- Returns
- Boolean to know if the frame number is set or not.
Definition at line 200 of file usMotorSettings.cpp.
Referenced by usMotorSettings::operator=(), and usMotorSettings::operator==().
◆ getAxialResolution()
|
inherited |
Axial resolution getter.
- Examples
- testUsImageRf3DMhdParser.cpp.
Definition at line 118 of file usImagePreScanSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usPreScanToPostScan2DConverter::convert(), usMHDSequenceReader::getImage(), usNetworkGrabberPreScan3D::includeFrameInVolume(), usNetworkGrabberRF3D::includeFrameInVolume(), usPreScanToPostScan3DConverter::init(), usImagePreScanSettings::operator=(), usImagePreScanSettings::operator==(), usImageIo::read(), usImageIo::write(), and usMHDSequenceWriter::write().
◆ getConstData()
| const Type * usImageRF3D< Type >::getConstData |
Get the bitmap pointer (read-only).
- Returns
- The consted bitmap pointer.
Definition at line 495 of file usImageRF3D.h.
Referenced by usImageRF3D< Type >::operator=(), and usImageRF3D< Type >::usImageRF3D().
◆ getDepth()
|
inherited |
Setter for depth : distance in meters between first and last pixel in a scan line.
- Returns
- Depth in meters.
- Examples
- tutorial-servo-target-confidence.cpp, tutorial-servo-target.cpp, tutorial-sonosite-confidence-control.cpp, and tutorial-sonosite-confidence-map.cpp.
Definition at line 289 of file usTransducerSettings.cpp.
Referenced by usPostScanToPreScan2DConverter::convert(), usPreScanToPostScan2DConverter::convert(), usRFToPreScan3DConverter::convert(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::includeFrameInVolume(), usNetworkGrabberRF3D::includeFrameInVolume(), usPostScanToPreScan2DConverter::init(), usPreScanToPostScan2DConverter::init(), and usTransducerSettings::operator=().
◆ getFieldOfView()
|
inherited |
Getter for the transducer field of view (based on scan line number and pitch).
- Returns
- The transducer field of view in radians if the probe is convex, in meters if it is linear.
- Examples
- tutorial-servo-target-confidence.cpp, tutorial-servo-target.cpp, tutorial-sonosite-confidence-control.cpp, tutorial-sonosite-confidence-map.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, and tutorial-ultrasonix-servo-target-confidence.cpp.
Definition at line 244 of file usTransducerSettings.cpp.
Referenced by usPostScanToPreScan2DConverter::convert(), usPostScanToPreScan2DConverter::init(), usPreScanToPostScan2DConverter::init(), usImageDisplayWidgetRobotControl::updateConfidenceAngle(), and usImageDisplayWidgetQmlOverlayServoing::updateConfidenceAngle().
◆ getFrame()
| void usImageRF3D< Type >::getFrame | ( | usImageRF2D< Type > & | image, |
| unsigned int | index | ||
| ) | const |
Returns a 2D slice of the volume at a given index.
- Parameters
-
[out] image The 2D frame. [in] index Position of the frame to extract in the volume.
Definition at line 395 of file usImageRF3D.h.
References usImageRF2D< Type >::resize(), and usImagePreScanSettings::setImagePreScanSettings().
Referenced by usRFToPreScan3DConverter::convert(), and usElastography3D::run().
◆ getFrameNumber()
|
inherited |
Getter for frame number.
- Returns
- The number of frames used for 3D acquisition.
Definition at line 159 of file usMotorSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), usNetworkGrabberPreScan3D::includeFrameInVolume(), usNetworkGrabberRF3D::includeFrameInVolume(), usMotorSettings::operator=(), usMotorSettings::operator==(), usImagePreScan3D< Type >::usImagePreScan3D(), usImageRF3D< Type >::usImageRF3D(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getFramePitch()
|
inherited |
Get the frame pitch (radians or meters).
- Returns
- framePitch Frame pitch between two sucessive frames. In meters if motorType is linear, in radians otherwise.
Definition at line 153 of file usMotorSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), usMotorSettings::operator=(), usMotorSettings::operator==(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getHeight()
| unsigned int usImageRF3D< Type >::getHeight |
Get the volume height.
- Returns
- The volume height, in number of voxels.
- Examples
- testUsImageRf3DMhdParser.cpp.
Definition at line 477 of file usImageRF3D.h.
Referenced by usRFToPreScan3DConverter::convert(), usImageRF3D< Type >::operator=(), usImageRF3D< Type >::operator==(), usImageRF3D< Type >::usImageRF3D(), usImageIo::write(), and usMHDSequenceWriter::write().
◆ getImagePreScanSettings()
|
inherited |
Definition at line 120 of file usImagePreScanSettings.cpp.
◆ getMotorFieldOfView()
|
inherited |
Getter for the motor field of view (based on frame number and pitch).
- Returns
- The motor field of view in radians if the probe is convex, in meters if it is linear.
Definition at line 206 of file usMotorSettings.cpp.
◆ getMotorRadius()
|
inherited |
Get the motor radius (m).
- Returns
- motorRadius Motor radius in meters.
Definition at line 141 of file usMotorSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), usMotorSettings::operator=(), usMotorSettings::operator==(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getMotorSettings()
|
inherited |
Definition at line 234 of file usMotorSettings.cpp.
◆ getMotorType()
|
inherited |
Get the motor type : linear, titling (small rotation angle) or rotational (360° rotation).
- Returns
- usMotorType to get the motor type.
Definition at line 178 of file usMotorSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), usPreScanToPostScan3DConverter::init(), usMotorSettings::operator=(), usMotorSettings::operator==(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getNumberOfFrames()
| unsigned int usImageRF3D< Type >::getNumberOfFrames |
Get the volume size along the w-axis.
- Returns
- The w-axis size in voxels, in number of voxels.
Definition at line 483 of file usImageRF3D.h.
Referenced by usRFToPreScan3DConverter::convert(), usImageRF3D< Type >::operator=(), usImageRF3D< Type >::operator==(), usImageRF3D< Type >::usImageRF3D(), usImageIo::write(), and usMHDSequenceWriter::write().
◆ getProbeName()
|
inherited |
Getter for the probe name.
- Returns
- Name of the probe.
Definition at line 232 of file usTransducerSettings.cpp.
◆ getRFSampleNumber()
| unsigned int usImageRF3D< Type >::getRFSampleNumber |
Gets the number of RF samples along a scan line.
Definition at line 319 of file usImageRF3D.h.
◆ getSamplingFrequency()
|
inherited |
Getter for sampling frequency : frequency used to sample the echo of the ultrasound wave.
- Returns
- Sampling frequency Frequency in Hz.
Definition at line 305 of file usTransducerSettings.cpp.
Referenced by usTransducerSettings::operator=(), usTransducerSettings::operator==(), usImageIo::read(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getScanLineNumber()
|
inherited |
Getter for the scan line number.
- Returns
- Number of scan lines acquired by the probe transducer.
Definition at line 216 of file usTransducerSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), usPostScanToPreScan2DConverter::convert(), usPreScanToPostScan2DConverter::convert(), usNetworkGrabberPreScan3D::includeFrameInVolume(), usNetworkGrabberRF3D::includeFrameInVolume(), usTransducerSettings::operator=(), usTransducerSettings::operator==(), usImageIo::read(), usImagePreScan2D< Type >::usImagePreScan2D(), usImagePreScan3D< Type >::usImagePreScan3D(), usImageRF2D< Type >::usImageRF2D(), usImageRF3D< Type >::usImageRF3D(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getScanLinePitch()
|
inherited |
Get the scan line pitch (m).
- Returns
- When the probe transducer is convex, returns the angle in radians between two successive scan lines acquired by the transducer.
- When the probe transducer is linear, returns the distance in meters between two successive scan lines acquired by the transducer.
- Examples
- tutorial-servo-target-confidence.cpp, tutorial-sonosite-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, and tutorial-ultrasonix-servo-target-confidence.cpp.
Definition at line 182 of file usTransducerSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), usPreScanToPostScan2DConverter::convert(), usNetworkGrabberPreScan3D::includeFrameInVolume(), usNetworkGrabberRF3D::includeFrameInVolume(), usPostScanToPreScan2DConverter::init(), usPreScanToPostScan2DConverter::init(), usTransducerSettings::operator=(), usTransducerSettings::operator==(), usImageIo::read(), usImageDisplayWidgetRobotControl::updateConfidenceAngle(), usImageDisplayWidgetQmlOverlayServoing::updateConfidenceAngle(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getSize()
| unsigned int usImageRF3D< Type >::getSize |
Get the volume size.
- Returns
- The number of voxels in the volume.
Definition at line 489 of file usImageRF3D.h.
◆ getTransducerRadius()
|
inherited |
Get the probe transducer radius (m).
- Returns
- Transducer radius in meters. The transducer radius is set to 0 if the probe is linear.
- Examples
- tutorial-servo-target-confidence.cpp, tutorial-servo-target.cpp, tutorial-sonosite-confidence-control.cpp, and tutorial-sonosite-confidence-map.cpp.
Definition at line 163 of file usTransducerSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), usPostScanToPreScan2DConverter::convert(), usPreScanToPostScan2DConverter::convert(), usNetworkGrabberPreScan3D::includeFrameInVolume(), usNetworkGrabberRF3D::includeFrameInVolume(), usPostScanToPreScan2DConverter::init(), usPreScanToPostScan2DConverter::init(), usTransducerSettings::operator=(), usTransducerSettings::operator==(), usImageIo::read(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getTransducerSettings()
|
inherited |
Getter for transducer settings : allows heritating classes to get the transducer settings.
- Returns
- The transducer settings.
Definition at line 295 of file usTransducerSettings.cpp.
◆ getTransmitFrequency()
|
inherited |
Getter for transmit frequency : frequency of the ultrasound wave used.
- Returns
- Transmit frequency in Hz.
Definition at line 311 of file usTransducerSettings.cpp.
Referenced by usTransducerSettings::operator=(), usTransducerSettings::operator==(), usImageIo::read(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getWidth()
| unsigned int usImageRF3D< Type >::getWidth |
Get the volume width.
- Returns
- The volume width, in number of voxels.
Definition at line 471 of file usImageRF3D.h.
Referenced by usRFToPreScan3DConverter::convert(), usImageRF3D< Type >::operator=(), usImageRF3D< Type >::operator==(), usImageRF3D< Type >::usImageRF3D(), usImageIo::write(), and usMHDSequenceWriter::write().
◆ insertFrame()
| void usImageRF3D< Type >::insertFrame | ( | const usImageRF2D< short > & | frame, |
| unsigned int | index | ||
| ) |
Insert at a given index to update the volume while grabbing successive 2D frames.
- Parameters
-
frame The 2D frame to insert. index Position to insert the frame in the volume.
Definition at line 369 of file usImageRF3D.h.
References usImageRF2D< Type >::getHeight(), and usImageRF2D< Type >::getWidth().
◆ isTransducerConvex()
|
inherited |
Returns the probe transducer type.
- Returns
- True if the transducer is convex, false if the transducer is linear.
Definition at line 201 of file usTransducerSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), usPostScanToPreScan2DConverter::convert(), usPreScanToPostScan2DConverter::convert(), usPostScanToPreScan2DConverter::init(), usPreScanToPostScan2DConverter::init(), usPreScanToPostScan3DConverter::init(), usTransducerSettings::operator=(), usTransducerSettings::operator==(), usImageIo::read(), usTransducerSettings::setTransducerConvexity(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ operator!=() [1/2]
|
inherited |
Compare two motor settings.
- Parameters
-
other Motor settings to compare.
- Returns
- false if settings are the same, true otherwise.
Definition at line 116 of file usMotorSettings.cpp.
References usMotorSettings::operator==().
◆ operator!=() [2/2]
|
inherited |
Compare two probe transducer settings.
- Returns
- False if the settings are the same, true otherwise.
Definition at line 125 of file usTransducerSettings.cpp.
References usTransducerSettings::operator==().
◆ operator()() [1/2]
| Type usImageRF3D< Type >::operator() | ( | unsigned int | i, |
| unsigned int | j, | ||
| unsigned int | k | ||
| ) | const |
Access operator for value in voxel (i, j, k)
- Parameters
-
i Index along i-axis to access (from 0 to height-1). j Index along j-axis to access (from 0 to width-1). k Index along k-axis to access (from 0 to numberOfFrames-1).
Definition at line 503 of file usImageRF3D.h.
◆ operator()() [2/2]
| void usImageRF3D< Type >::operator() | ( | unsigned int | i, |
| unsigned int | j, | ||
| unsigned int | k, | ||
| const Type & | value | ||
| ) |
Set value in voxel (i, j, k)
- Parameters
-
i Index along i-axis to write in (from 0 to height-1). j Index along j-axis to write in (from 0 to width-1). k Index along k-axis to write in (from 0 to numberOfFrames-1). value Value to insert.
Definition at line 520 of file usImageRF3D.h.
◆ operator=()
| usImageRF3D< Type > & usImageRF3D< Type >::operator= | ( | const usImageRF3D< Type > & | other | ) |
Copy operator.
- Parameters
-
other 3D RF image to copy.
Definition at line 259 of file usImageRF3D.h.
References usImageRF3D< Type >::getConstData(), usImageRF3D< Type >::getHeight(), usImageRF3D< Type >::getNumberOfFrames(), usImageRF3D< Type >::getWidth(), usImagePreScanSettings::operator=(), and usMotorSettings::operator=().
◆ operator==() [1/4]
|
inherited |
Comparison operator.
- Parameters
-
other usImagePreScanSettings to compare with.
Definition at line 95 of file usImagePreScanSettings.cpp.
References usImagePreScanSettings::getAxialResolution().
Referenced by usImageRF2D< Type >::operator==().
◆ operator==() [2/4]
| bool usImageRF3D< Type >::operator== | ( | const usImageRF3D< Type > & | other | ) |
Comparison operator.
- Parameters
-
other 3D RF image to compare with.
Definition at line 280 of file usImageRF3D.h.
References usImageRF3D< Type >::getHeight(), usImageRF3D< Type >::getNumberOfFrames(), and usImageRF3D< Type >::getWidth().
◆ operator==() [3/4]
|
inherited |
Compare two motor settings.
- Parameters
-
other Motor settings to compare.
- Returns
- true if settings are the same, false otherwise.
Definition at line 104 of file usMotorSettings.cpp.
References usMotorSettings::frameNumberIsSet(), usMotorSettings::getFrameNumber(), usMotorSettings::getFramePitch(), usMotorSettings::getMotorRadius(), and usMotorSettings::getMotorType().
Referenced by usMotorSettings::operator!=(), and usImagePostScan3D< Type >::operator==().
◆ operator==() [4/4]
|
inherited |
Compare two probe transducer settings.
- Returns
- True if the settings are the same, false otherwise.
Definition at line 111 of file usTransducerSettings.cpp.
References usTransducerSettings::getSamplingFrequency(), usTransducerSettings::getScanLineNumber(), usTransducerSettings::getScanLinePitch(), usTransducerSettings::getTransducerRadius(), usTransducerSettings::getTransmitFrequency(), and usTransducerSettings::isTransducerConvex().
Referenced by usTransducerSettings::operator!=(), and usImagePostScan3D< Type >::operator==().
◆ resize()
| void usImageRF3D< Type >::resize | ( | unsigned int | height, |
| unsigned int | width, | ||
| unsigned int | numberOfFrames | ||
| ) |
Resize the 3D RF image.
Updates also the transducer scan line number that corresponds to the image U-size and the motor frame number that corresponds to the image W-size.
- Parameters
-
height Image height. width Image width. numberOfFrames Number of frames in the volume.
- Examples
- testUsImageRf3DMhdParser.cpp.
Definition at line 357 of file usImageRF3D.h.
References usMotorSettings::setFrameNumber(), and usTransducerSettings::setScanLineNumber().
Referenced by usMHDSequenceReader::acquire(), usMHDSequenceReader::getImage(), usImageIo::read(), and usImageRF3D< Type >::usImageRF3D().
◆ scanLineNumberIsSet()
|
inherited |
Getter to know if the scan line number is set (usefull in case of field of view setter call).
- Returns
- Boolean to know if the scan line number is set or not.
Definition at line 277 of file usTransducerSettings.cpp.
Referenced by usTransducerSettings::operator=().
◆ setAxialResolution()
|
inherited |
Axial resolution setter.
- Parameters
-
axialResolution Axial resloution to assign to the settings.
- Examples
- testUsImagePreScan2DMhdParser.cpp, testUsImagePreScan2DXmlParser.cpp, testUsImagePreScan3DMhdParser.cpp, and testUsImageRf3DMhdParser.cpp.
Definition at line 113 of file usImagePreScanSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usPostScanToPreScan2DConverter::convert(), usRFToPreScan3DConverter::convert(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), and usImageIo::read().
◆ setDepth()
|
inherited |
Setter for depth : distance in meters between first and last pixel in a scan line.
- Parameters
-
depth Distance in meters.
- Examples
- testUsImageRf3DMhdParser.cpp, tutorial-rfFileToPreScanConversion.cpp, tutorial-servo-target-confidence.cpp, tutorial-servo-target.cpp, tutorial-sonosite-confidence-control.cpp, tutorial-sonosite-confidence-map.cpp, and tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp.
Definition at line 283 of file usTransducerSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usPreScanToPostScan2DConverter::convert(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), and usImageIo::read().
◆ setFieldOfView()
|
inherited |
Setter for the transducer field of view (updates the scan line pitch).
- Parameters
-
fieldOfView The transducer field of view in radians if the transducer is convex, in meters if the transducer is linear.
- Warning
- Be sure to use setScanLineNumber() to update the scan line number before the field of view since this method computes the scan line pitch from the field of view and the scan line pitch. usTransducerSettings transducerSettings;transducerSettings.setScanLineNumber(128);transducerSettings.setFieldOfView(vpMath::rad(57.0)); // field of view is 57 degGeneric class for 2D ultrasound data common settings associated to the type of probe transducer used ...Definition: usTransducerSettings.h:81void setFieldOfView(double fieldOfView)Definition: usTransducerSettings.cpp:265void setScanLineNumber(unsigned int scanLineNumber)Definition: usTransducerSettings.cpp:222
- Examples
- tutorial-servo-target-confidence.cpp, tutorial-servo-target.cpp, tutorial-sonosite-confidence-control.cpp, and tutorial-sonosite-confidence-map.cpp.
Definition at line 265 of file usTransducerSettings.cpp.
Referenced by usPostScanToPreScan2DConverter::convert().
◆ setFrameNumber()
| void usImageRF3D< Type >::setFrameNumber | ( | unsigned int | frameNumber | ) |
Set the motor frame number.
Resize also the image W-size that is equal to the frame number.
- Parameters
-
frameNumber Number of frames in the 3D volume.
Definition at line 340 of file usImageRF3D.h.
References usMotorSettings::setFrameNumber().
◆ setFramePitch()
|
inherited |
Set the frame angle (rad).
- Parameters
-
framePitch Frame angle of the probe in radians.
Definition at line 147 of file usMotorSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), and usImageSettingsXmlParser::readMainClass().
◆ setImagePreScanSettings()
|
inherited |
Copy constructor.
- Parameters
-
preScanSettings Pre-scan settings to copy.
Definition at line 69 of file usImagePreScanSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usPostScanToPreScan2DConverter::convert(), usRFToPreScan2DConverter::convert(), usRFToPreScan3DConverter::convert(), usImageRF3D< Type >::getFrame(), usMHDSequenceReader::getImage(), usImageIo::read(), usScanlineConfidence2D::run(), and usImageRF2D< Type >::usImageRF2D().
◆ setMotorFieldOfView()
|
inherited |
Setter for the motor field of view (updates the frame pitch).
- Parameters
-
motorFieldOfView The motor field of view in radians if the motor is convex, in meters if the motor is linear.
- Warning
- Be sure to use setFrameNumber() to update the frame number before the field of view since this method computes the frame pitch from the field of view and the frame pitch. usMotorSettings motorSettings;motorSettings.setFrameNumber(128);motorSettings.setMotorFieldOfView(vpMath::rad(57.0)); // field of view is 57 degGeneric class for 3D ultrasound motor settings associated to the 3D probe used during acquisition.Definition: usMotorSettings.h:78void setFrameNumber(unsigned int frameNumber)Definition: usMotorSettings.cpp:190void setMotorFieldOfView(double motorFieldOfView)Definition: usMotorSettings.cpp:226
Definition at line 226 of file usMotorSettings.cpp.
◆ setMotorRadius()
|
inherited |
Set the motor radius (m).
- Parameters
-
motorRadius Motor radius in meters.
Definition at line 135 of file usMotorSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), usImageSettingsXmlParser::readMainClass(), and usMotorSettings::setMotorType().
◆ setMotorSettings()
|
inherited |
Set the motor settings from other motor settings.
- Returns
- usMotorSettings Settings to copy.
Definition at line 184 of file usMotorSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usRFToPreScan3DConverter::convert(), usPreScanToPostScan3DConverter::convert(), usMHDSequenceReader::getImage(), and usImageIo::read().
◆ setMotorType()
|
inherited |
Set the motor type : convex or linear (from probe type used to acquire the image).
- Parameters
-
motorType Motor type to specify the motor type : LinearMotor, TiltingMotor (for a rotative motor), RotationalMotor (for a 360° rotative motor).
Definition at line 166 of file usMotorSettings.cpp.
References usMotorSettings::LinearMotor, and usMotorSettings::setMotorRadius().
Referenced by usMHDSequenceReader::acquire(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), and usImageSettingsXmlParser::readMainClass().
◆ setProbeName()
|
inherited |
Setter for the probe name.
- Parameters
-
probeName Name of the probe.
- Examples
- tutorial-servo-target-confidence.cpp, tutorial-servo-target.cpp, tutorial-sonosite-confidence-control.cpp, tutorial-sonosite-confidence-map.cpp, and tutorial-sonosite-grabber.cpp.
Definition at line 238 of file usTransducerSettings.cpp.
◆ setSamplingFrequency()
|
inherited |
Setter for sampling frequency : frequency used to sample the echo of the ultrasound wave.
- Parameters
-
samplingFrequency Frequency in Hz.
- Examples
- testUsImagePostScan2DMhdParser.cpp, testUsImagePostScan2DXmlParser.cpp, testUsImagePostScan3DMhdParser.cpp, testUsImagePreScan2DMhdParser.cpp, testUsImagePreScan2DXmlParser.cpp, testUsImagePreScan3DMhdParser.cpp, and testUsImageRf3DMhdParser.cpp.
Definition at line 317 of file usTransducerSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), usImageSettingsXmlParser::readMainClass(), and usImageSettingsXmlParser::setImageSettings().
◆ setScanLineNumber()
| void usImageRF3D< Type >::setScanLineNumber | ( | unsigned int | scanLineNumber | ) |
Set the transducer scan line number.
Resize also the image U-size that is equal to the scan line number.
- Parameters
-
scanLineNumber Number of scan lines acquired by the transducer.
Definition at line 327 of file usImageRF3D.h.
References usTransducerSettings::setScanLineNumber().
◆ setScanLinePitch()
|
inherited |
Set the scan line pitch.
- Parameters
-
scanLinePitch If the probe transducer is convex, this parameters refers to the angle in radians between two successive scan lines acquired by the transducer. If the probe is linear, this parameters refers to the distance in meters between two successive scan lines acquired by the transducer.
- Examples
- testUsImagePostScan2DMhdParser.cpp, testUsImagePostScan2DXmlParser.cpp, testUsImagePostScan3DMhdParser.cpp, testUsImagePreScan2DMhdParser.cpp, testUsImagePreScan2DXmlParser.cpp, testUsImagePreScan3DMhdParser.cpp, testUsImageRf3DMhdParser.cpp, tutorial-rfFileToPreScanConversion.cpp, tutorial-sonosite-grabber.cpp, and tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp.
Definition at line 171 of file usTransducerSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usPreScanToPostScan2DConverter::convert(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), usImageSettingsXmlParser::readMainClass(), and usImageSettingsXmlParser::setImageSettings().
◆ setTransducerConvexity()
|
inherited |
Set the probe transducer type.
- Parameters
-
isTransducerConvex True if the transducer is convex, false if the transducer is linear. Sets the probe transducer radius to 0 in case of a linear transducer.
- Examples
- testUsImagePostScan2DMhdParser.cpp, testUsImagePostScan2DXmlParser.cpp, testUsImagePostScan3DMhdParser.cpp, testUsImagePreScan2DMhdParser.cpp, testUsImagePreScan2DXmlParser.cpp, testUsImagePreScan3DMhdParser.cpp, testUsImageRf3DMhdParser.cpp, tutorial-servo-target-confidence.cpp, tutorial-servo-target.cpp, tutorial-sonosite-confidence-control.cpp, tutorial-sonosite-confidence-map.cpp, tutorial-sonosite-grabber.cpp, and tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp.
Definition at line 189 of file usTransducerSettings.cpp.
References usTransducerSettings::isTransducerConvex().
Referenced by usMHDSequenceReader::acquire(), usPostScanToPreScan2DConverter::convert(), usPreScanToPostScan2DConverter::convert(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), usImageSettingsXmlParser::readMainClass(), and usImageSettingsXmlParser::setImageSettings().
◆ setTransducerRadius()
|
inherited |
Set the probe transducer radius (m).
- Parameters
-
transducerRadius Probe transducer radius in meters. The probe transducer radius is set to 0 in case of a linear probe. See isTransducerConvex() and setProbeConvex(bool) for more information.
- Examples
- testUsImagePostScan2DMhdParser.cpp, testUsImagePostScan2DXmlParser.cpp, testUsImagePostScan3DMhdParser.cpp, testUsImagePreScan2DMhdParser.cpp, testUsImagePreScan2DXmlParser.cpp, testUsImagePreScan3DMhdParser.cpp, testUsImageRf3DMhdParser.cpp, tutorial-rfFileToPreScanConversion.cpp, tutorial-servo-target-confidence.cpp, tutorial-servo-target.cpp, tutorial-sonosite-confidence-control.cpp, tutorial-sonosite-confidence-map.cpp, tutorial-sonosite-grabber.cpp, and tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp.
Definition at line 157 of file usTransducerSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usPostScanToPreScan2DConverter::convert(), usPreScanToPostScan2DConverter::convert(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), usImageSettingsXmlParser::readMainClass(), and usImageSettingsXmlParser::setImageSettings().
◆ setTransducerSettings()
|
inherited |
Assignment operator.
- Parameters
-
other Settings you want to assign.
- See also
- operator=()
Definition at line 210 of file usTransducerSettings.cpp.
Referenced by usPreScanToPostScan3DConverter::convert().
◆ setTransmitFrequency()
|
inherited |
Setter for transmit frequency : frequency of the ultrasound wave used.
- Parameters
-
transmitFrequency Frequency in Hz.
- Examples
- testUsImagePostScan2DMhdParser.cpp, testUsImagePostScan2DXmlParser.cpp, testUsImagePostScan3DMhdParser.cpp, testUsImagePreScan2DMhdParser.cpp, testUsImagePreScan2DXmlParser.cpp, testUsImagePreScan3DMhdParser.cpp, and testUsImageRf3DMhdParser.cpp.
Definition at line 326 of file usTransducerSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), usImageSettingsXmlParser::readMainClass(), and usImageSettingsXmlParser::setImageSettings().
Friends And Related Function Documentation
◆ usRawFileParser
|
friend |
Definition at line 137 of file usImageRF3D.h.