#include <visp3/ustk_core/usMotorSettings.h>
 Inheritance diagram for usMotorSettings:
Inheritance diagram for usMotorSettings:
Public Types | |
| enum | usMotorType { LinearMotor = 0 , TiltingMotor = 1 , RotationalMotor = 2 } |
Public Member Functions | |
| usMotorSettings () | |
| usMotorSettings (double motorRadius, double framePitch, unsigned int frameNumber, const usMotorType &motorType) | |
| usMotorSettings (const usMotorSettings &other) | |
| virtual | ~usMotorSettings () |
Inherited functionalities from usMotorSettings | |
| unsigned int | getFrameNumber () const |
| double | getFramePitch () const |
| double | getMotorFieldOfView () const |
| double | getMotorRadius () const |
| usMotorSettings | getMotorSettings () const |
| usMotorType | getMotorType () const |
| bool | frameNumberIsSet () const |
| usMotorSettings & | operator= (const usMotorSettings &other) |
| bool | operator== (const usMotorSettings &other) |
| bool | operator!= (const usMotorSettings &other) |
| void | setFrameNumber (unsigned int frameNumber) |
| void | setFramePitch (double framePitch) |
| void | setMotorFieldOfView (double motorFieldOfView) |
| void | setMotorRadius (double motorRadius) |
| void | setMotorSettings (const usMotorSettings &other) |
| void | setMotorType (const usMotorType &motorType) |
| VISP_EXPORT std::ostream & | operator<< (std::ostream &out, const usMotorSettings &other) |
Detailed Description
Generic class for 3D ultrasound motor settings associated to the 3D probe used during acquisition.
This class represents motor settings for 3D ultrasound images which are the common settings corresponding to the motor used to produce the third dimension.
These settings are:
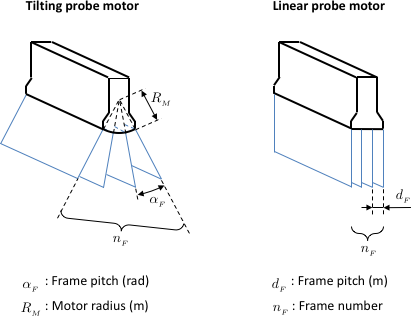
- the type of motor used to move the transducer: linear, tilting (small rotation) or rotationnal (360° rotation). This type is defined in usMotorType and could be set using setMotorType(). To retrieve the motor type use getMotorType().
- the motor radius
 (value set to zero for a linear motor). This value could be set using setMotorRadius() or get using getMotorRadius().
(value set to zero for a linear motor). This value could be set using setMotorRadius() or get using getMotorRadius(). - the frame pitch that corresponds to the angle
 (in radians) between to successive frame acquisitions when the motor is convex, or to the distance
(in radians) between to successive frame acquisitions when the motor is convex, or to the distance  (in meters) when the motor is linear. To set this value use setFramePitch() and to access use getFramePitch().
(in meters) when the motor is linear. To set this value use setFramePitch() and to access use getFramePitch(). - the frame number
 that corresponds to the number of frames acquired by the probe to generate the 3D volume. This number is set using setFrameNumber() and could be retrieved using getFrameNumber().
that corresponds to the number of frames acquired by the probe to generate the 3D volume. This number is set using setFrameNumber() and could be retrieved using getFrameNumber().
The following figure summerize these motor settings.
Definition at line 77 of file usMotorSettings.h.
Member Enumeration Documentation
◆ usMotorType
Enumerator for motor type
| Enumerator | |
|---|---|
| LinearMotor | Case of a linear motor. |
| TiltingMotor | Case of a tilting motor (small rotation). |
| RotationalMotor | Case of a roatational motor (360° rotation). |
Definition at line 81 of file usMotorSettings.h.
Constructor & Destructor Documentation
◆ usMotorSettings() [1/3]
| usMotorSettings::usMotorSettings | ( | ) |
Basic Constructor, all settings set to default.
Definition at line 50 of file usMotorSettings.cpp.
◆ usMotorSettings() [2/3]
| usMotorSettings::usMotorSettings | ( | double | motorRadius, |
| double | framePitch, | ||
| unsigned int | frameNumber, | ||
| const usMotorType & | motorType | ||
| ) |
Full Constructor, all settings availables
- Parameters
-
motorRadius Distance between the rotation center of the probe motor and the first pixel arc acquired, in meters (m). framePitch Pitch between two sucessive frames. In meters if motorType is linear, in radians (rad) otherwise. frameNumber Number of frame acquired by the probe. motorType Probe motor type.
Definition at line 63 of file usMotorSettings.cpp.
◆ usMotorSettings() [3/3]
| usMotorSettings::usMotorSettings | ( | const usMotorSettings & | other | ) |
Copy Constructor, all settings availables
- Parameters
-
other usMotorSettings you want to copy.
Definition at line 74 of file usMotorSettings.cpp.
◆ ~usMotorSettings()
|
virtual |
Destructor.
Definition at line 83 of file usMotorSettings.cpp.
Member Function Documentation
◆ frameNumberIsSet()
| bool usMotorSettings::frameNumberIsSet | ( | ) | const |
Getter to know if the scan frame is set (usefull in case of field of view setter call).
- Returns
- Boolean to know if the frame number is set or not.
Definition at line 200 of file usMotorSettings.cpp.
Referenced by operator=(), and operator==().
◆ getFrameNumber()
| unsigned int usMotorSettings::getFrameNumber | ( | ) | const |
Getter for frame number.
- Returns
- The number of frames used for 3D acquisition.
Definition at line 159 of file usMotorSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), usNetworkGrabberPreScan3D::includeFrameInVolume(), usNetworkGrabberRF3D::includeFrameInVolume(), operator=(), operator==(), usImagePreScan3D< Type >::usImagePreScan3D(), usImageRF3D< Type >::usImageRF3D(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getFramePitch()
| double usMotorSettings::getFramePitch | ( | ) | const |
Get the frame pitch (radians or meters).
- Returns
- framePitch Frame pitch between two sucessive frames. In meters if motorType is linear, in radians otherwise.
Definition at line 153 of file usMotorSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), operator=(), operator==(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getMotorFieldOfView()
| double usMotorSettings::getMotorFieldOfView | ( | ) | const |
Getter for the motor field of view (based on frame number and pitch).
- Returns
- The motor field of view in radians if the probe is convex, in meters if it is linear.
Definition at line 206 of file usMotorSettings.cpp.
◆ getMotorRadius()
| double usMotorSettings::getMotorRadius | ( | ) | const |
Get the motor radius (m).
- Returns
- motorRadius Motor radius in meters.
Definition at line 141 of file usMotorSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), operator=(), operator==(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ getMotorSettings()
| usMotorSettings usMotorSettings::getMotorSettings | ( | ) | const |
Definition at line 234 of file usMotorSettings.cpp.
◆ getMotorType()
| usMotorSettings::usMotorType usMotorSettings::getMotorType | ( | ) | const |
Get the motor type : linear, titling (small rotation angle) or rotational (360° rotation).
- Returns
- usMotorType to get the motor type.
Definition at line 178 of file usMotorSettings.cpp.
Referenced by usPixelMeterConversion::convert(), usMeterPixelConversion::convert(), usPreScanToPostScan3DConverter::init(), operator=(), operator==(), usImageIo::write(), usMHDSequenceWriter::write(), and usImageSettingsXmlParser::writeMainClass().
◆ operator!=()
| bool usMotorSettings::operator!= | ( | const usMotorSettings & | other | ) |
Compare two motor settings.
- Parameters
-
other Motor settings to compare.
- Returns
- false if settings are the same, true otherwise.
Definition at line 116 of file usMotorSettings.cpp.
References operator==().
◆ operator=()
| usMotorSettings & usMotorSettings::operator= | ( | const usMotorSettings & | other | ) |
Assignment operator.
- Parameters
-
other Motor settings you want to copy.
Definition at line 89 of file usMotorSettings.cpp.
References frameNumberIsSet(), getFrameNumber(), getFramePitch(), getMotorRadius(), and getMotorType().
Referenced by usImagePostScan3D< Type >::operator=(), usImagePreScan3D< Type >::operator=(), and usImageRF3D< Type >::operator=().
◆ operator==()
| bool usMotorSettings::operator== | ( | const usMotorSettings & | other | ) |
Compare two motor settings.
- Parameters
-
other Motor settings to compare.
- Returns
- true if settings are the same, false otherwise.
Definition at line 104 of file usMotorSettings.cpp.
References frameNumberIsSet(), getFrameNumber(), getFramePitch(), getMotorRadius(), and getMotorType().
Referenced by operator!=(), and usImagePostScan3D< Type >::operator==().
◆ setFrameNumber()
| void usMotorSettings::setFrameNumber | ( | unsigned int | frameNumber | ) |
Setter for frame number.
- Parameters
-
frameNumber The number of frames used for 3D acquisition.
- Examples
- testUsImagePostScan3DMhdParser.cpp.
Definition at line 190 of file usMotorSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), usImagePreScan3D< Type >::resize(), usImageRF3D< Type >::resize(), usImagePreScan3D< Type >::setFrameNumber(), and usImageRF3D< Type >::setFrameNumber().
◆ setFramePitch()
| void usMotorSettings::setFramePitch | ( | double | framePitch | ) |
Set the frame angle (rad).
- Parameters
-
framePitch Frame angle of the probe in radians.
Definition at line 147 of file usMotorSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), and usImageSettingsXmlParser::readMainClass().
◆ setMotorFieldOfView()
| void usMotorSettings::setMotorFieldOfView | ( | double | motorFieldOfView | ) |
Setter for the motor field of view (updates the frame pitch).
- Parameters
-
motorFieldOfView The motor field of view in radians if the motor is convex, in meters if the motor is linear.
- Warning
- Be sure to use setFrameNumber() to update the frame number before the field of view since this method computes the frame pitch from the field of view and the frame pitch. usMotorSettings motorSettings;motorSettings.setFrameNumber(128);motorSettings.setMotorFieldOfView(vpMath::rad(57.0)); // field of view is 57 degGeneric class for 3D ultrasound motor settings associated to the 3D probe used during acquisition.Definition: usMotorSettings.h:78void setFrameNumber(unsigned int frameNumber)Definition: usMotorSettings.cpp:190void setMotorFieldOfView(double motorFieldOfView)Definition: usMotorSettings.cpp:226
Definition at line 226 of file usMotorSettings.cpp.
◆ setMotorRadius()
| void usMotorSettings::setMotorRadius | ( | double | motorRadius | ) |
Set the motor radius (m).
- Parameters
-
motorRadius Motor radius in meters.
Definition at line 135 of file usMotorSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), usImageSettingsXmlParser::readMainClass(), and setMotorType().
◆ setMotorSettings()
| void usMotorSettings::setMotorSettings | ( | const usMotorSettings & | other | ) |
Set the motor settings from other motor settings.
- Returns
- usMotorSettings Settings to copy.
Definition at line 184 of file usMotorSettings.cpp.
Referenced by usMHDSequenceReader::acquire(), usRFToPreScan3DConverter::convert(), usPreScanToPostScan3DConverter::convert(), usMHDSequenceReader::getImage(), and usImageIo::read().
◆ setMotorType()
| void usMotorSettings::setMotorType | ( | const usMotorType & | motorType | ) |
Set the motor type : convex or linear (from probe type used to acquire the image).
- Parameters
-
motorType Motor type to specify the motor type : LinearMotor, TiltingMotor (for a rotative motor), RotationalMotor (for a 360° rotative motor).
Definition at line 166 of file usMotorSettings.cpp.
References LinearMotor, and setMotorRadius().
Referenced by usMHDSequenceReader::acquire(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usMHDSequenceReader::getImage(), usImageIo::read(), and usImageSettingsXmlParser::readMainClass().
Friends And Related Function Documentation
◆ operator<<
|
friend |
Print probe settings information.
Definition at line 121 of file usMotorSettings.cpp.