#include <visp3/ustk_grabber/usNetworkGrabberRF2D.h>
 Inheritance diagram for usNetworkGrabberRF2D:
Inheritance diagram for usNetworkGrabberRF2D:
Public Types | |
| enum | usDataPositionInBuffer { OUTPUT_FRAME_POSITION_IN_VEC = 0 , MOST_RECENT_FRAME_POSITION_IN_VEC = 1 , CURRENT_FILLED_FRAME_POSITION_IN_VEC = 2 } |
| enum | usVolumeField { ODD = 0 , EVEN = 1 , ODD_EVEN = 2 } |
Public Slots | |
| void | center3DProbeMotor () |
| void | connected () |
| void | connectToServer () |
| void | connectToServer (QHostAddress address) |
| void | disconnected () |
| void | disconnectFromServer () |
| void | handleError (QAbstractSocket::SocketError err) |
| void | initAcquisitionSlot (usNetworkGrabber::usInitHeaderSent header) |
| void | processConnectionToServer () |
| void | runAcquisition () |
| void | stopAcquisition () |
Signals | |
| void | newFrameAvailable () |
| void | newFrame (usImageRF2D< short int > &) |
| void | serverUpdateEnded (bool success) |
| void | endBlockingLoop () |
| void | runAcquisitionSignal (bool run) |
| void | sendAcquisitionParametersSignal () |
| void | endConnection () |
| void | acquisitionInitialized (bool) |
Protected Slots | |
| void | serverUpdated (bool sucess) |
| void | sendRunSignal (bool run) |
| void | sendAcquisitionParametersSlot () |
Protected Attributes | |
| bool | m_verbose |
| QTcpSocket * | m_tcpSocket |
| bool | m_connect |
| std::string | m_ip |
| int | m_bytesLeftToRead |
| usAcquisitionParameters | m_acquisitionParameters |
| bool | m_updateParametersSucess |
| usInitHeaderConfirmation | m_confirmHeader |
| us::usImageHeader | m_imageHeader |
| bool | m_isInit |
| bool | m_isRunning |
| QThread * | m_thread |
Detailed Description
Specific class to grab RF frames from the ultrasound station on the network.
The following figure details the network communication process and summarizes the steps to follow to acquire ultrasound images :
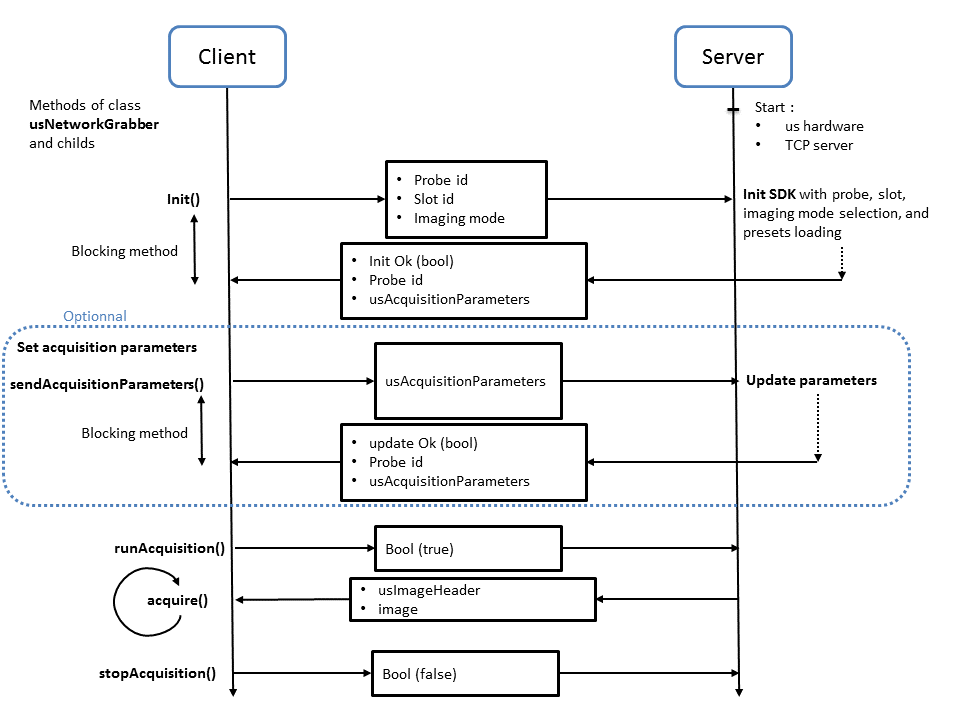
This grabber manages a buffer system to avoid multiple copy of the frames. The acquire() method returns you a pointer on a new frame, you can acess and modify the frame (it is thread-safe). Acquire() can be blocking, the behaviour depends on how often you call it :
- If you call acquire() faster than the frames are arriving on the network, it is blocking to wait next frame coming.
- If you call it slower you will loose frames, but you will get the last frame available.
- Examples
- tutorial-elastography-2D-separate-displays.cpp, tutorial-elastography-2D.cpp, tutorial-elastography-BMA-2D.cpp, tutorial-local-grabbing-elastography-display.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, tutorial-ultrasonix-qt-grabbing-RF.cpp, and tutorial-ustk-virtual-server-RF2D.cpp.
Definition at line 67 of file usNetworkGrabberRF2D.h.
Member Enumeration Documentation
◆ usDataPositionInBuffer
|
inherited |
| Enumerator | |
|---|---|
| OUTPUT_FRAME_POSITION_IN_VEC | |
| MOST_RECENT_FRAME_POSITION_IN_VEC | |
| CURRENT_FILLED_FRAME_POSITION_IN_VEC | |
Definition at line 75 of file usNetworkGrabber.h.
◆ usVolumeField
|
inherited |
Enum to specify types of volumes to grab
| Enumerator | |
|---|---|
| ODD | Grab only odd volumes |
| EVEN | Grab only even volumes |
| ODD_EVEN | Grab every volumes |
Definition at line 82 of file usNetworkGrabber.h.
Constructor & Destructor Documentation
◆ usNetworkGrabberRF2D()
|
explicit |
Constructor. Inititializes the image, and manages Qt signal.
Definition at line 43 of file usNetworkGrabberRF2D.cpp.
References dataArrived(), and usNetworkGrabber::m_tcpSocket.
◆ ~usNetworkGrabberRF2D()
| usNetworkGrabberRF2D::~usNetworkGrabberRF2D | ( | ) |
Destructor.
Definition at line 61 of file usNetworkGrabberRF2D.cpp.
Member Function Documentation
◆ acquire()
| usFrameGrabbedInfo< usImageRF2D< short int > > * usNetworkGrabberRF2D::acquire | ( | ) |
Method to get the last frame received. The grabber is designed to avoid data copy (it is why you get a pointer on the data).
- Note
- This method is designed to be thread-safe, you can call it from another thread.
- Returns
- Pointer to the last frame acquired.
- Examples
- tutorial-elastography-2D-separate-displays.cpp, tutorial-elastography-2D.cpp, tutorial-elastography-BMA-2D.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, tutorial-ultrasonix-qt-grabbing-RF.cpp, and tutorial-ustk-virtual-server-RF2D.cpp.
Definition at line 256 of file usNetworkGrabberRF2D.cpp.
References usNetworkGrabber::MOST_RECENT_FRAME_POSITION_IN_VEC, newFrameAvailable(), and usNetworkGrabber::OUTPUT_FRAME_POSITION_IN_VEC.
◆ acquisitionInitialized
|
signalinherited |
Referenced by usNetworkGrabber::initAcquisitionSlot().
◆ activateRecording()
| void usNetworkGrabberRF2D::activateRecording | ( | std::string | path | ) |
Method to record the sequence received, to replay it later with the virtual server for example.
- Parameters
-
path The path where the sequence will be saved.
Definition at line 280 of file usNetworkGrabberRF2D.cpp.
References usMHDSequenceWriter::setSequenceDirectory().
◆ center3DProbeMotor
|
slotinherited |
Sets the motor position of 4DC7 probe to the middle.
Definition at line 768 of file usNetworkGrabber.cpp.
References usNetworkGrabber::sendAcquisitionParameters(), and usNetworkGrabber::setMotorPosition().
◆ connected
|
slotinherited |
Slot called when the grabber is connected to the server. Prints connection informations.
Definition at line 165 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_tcpSocket, and usNetworkGrabber::m_verbose.
Referenced by usNetworkGrabber::processConnectionToServer().
◆ connectToServer [1/2]
|
slotinherited |
Method used to connect to the server.
- Examples
- tutorial-elastography-2D-separate-displays.cpp, tutorial-elastography-2D.cpp, tutorial-elastography-3D-acquisition.cpp, tutorial-elastography-BMA-2D.cpp, tutorial-local-grabbing-elastography-display.cpp, tutorial-local-grabbing-pre-scan2D-display.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, tutorial-ultrasonix-qt-grabbing-RF.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp, tutorial-ultrasonix-servo-target-confidence.cpp, tutorial-ustk-virtual-server-RF2D.cpp, tutorial-ustk-virtual-server-RF3D.cpp, tutorial-ustk-virtual-server-postScan2D.cpp, tutorial-ustk-virtual-server-preScan2D.cpp, and tutorial-ustk-virtual-server-preScan3D.cpp.
Definition at line 96 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_connect, and usNetworkGrabber::processConnectionToServer().
◆ connectToServer [2/2]
|
slotinherited |
Method used to connect to the server.
Definition at line 105 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_connect, usNetworkGrabber::processConnectionToServer(), and usNetworkGrabber::setIPAddress().
◆ dataArrived()
|
virtual |
Slot called when data is coming on the network. Manages the type of data is coming and read it. Emits newFrameArrived signal when a whole frame is available.
Implements usNetworkGrabber.
Definition at line 68 of file usNetworkGrabberRF2D.cpp.
References us::usImageHeader::anglePerFr, usNetworkGrabber::CURRENT_FILLED_FRAME_POSITION_IN_VEC, us::usImageHeader::dataLength, us::usImageHeader::dataRate, us::usImageHeader::frameCount, us::usImageHeader::frameHeight, us::usImageHeader::framesPerVolume, us::usImageHeader::frameWidth, us::usImageHeader::headerId, usNetworkGrabber::usInitHeaderConfirmation::headerId, us::usImageHeader::imageDepth, us::usImageHeader::imageType, usNetworkGrabber::usInitHeaderConfirmation::initOk, usNetworkGrabber::m_bytesLeftToRead, usNetworkGrabber::m_confirmHeader, usNetworkGrabber::m_imageHeader, usNetworkGrabber::m_tcpSocket, usNetworkGrabber::m_verbose, usNetworkGrabber::MOST_RECENT_FRAME_POSITION_IN_VEC, us::usImageHeader::motorRadius, us::usImageHeader::motorType, newFrame(), newFrameAvailable(), us::usImageHeader::pixelHeight, us::usImageHeader::pixelWidth, usNetworkGrabber::usInitHeaderConfirmation::probeId, usNetworkGrabber::readAcquisitionParameters(), us::usImageHeader::samplingFrequency, us::usImageHeader::scanLineNumber, us::usImageHeader::scanLinePitch, usNetworkGrabber::serverUpdateEnded(), us::usImageHeader::ss, us::usImageHeader::timeStamp, us::usImageHeader::transducerRadius, us::usImageHeader::transmitFrequency, and usMHDSequenceWriter::write().
Referenced by usNetworkGrabberRF2D().
◆ disconnect()
|
inherited |
Method to close the connection.
Definition at line 293 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_tcpSocket.
◆ disconnected
|
slotinherited |
Slot called when the grabber is disconnected from the server. Prints information, and closes socket.
Definition at line 179 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_tcpSocket, and usNetworkGrabber::m_verbose.
Referenced by usNetworkGrabber::disconnectFromServer(), and usNetworkGrabber::processConnectionToServer().
◆ disconnectFromServer
|
slotinherited |
Method used to disconnect from the server.
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-local-grabbing-elastography-display.cpp, and tutorial-local-grabbing-pre-scan2D-display.cpp.
Definition at line 115 of file usNetworkGrabber.cpp.
References usNetworkGrabber::disconnected(), usNetworkGrabber::endConnection(), usNetworkGrabber::m_connect, and usNetworkGrabber::m_tcpSocket.
◆ endBlockingLoop
|
signalinherited |
◆ endConnection
|
signalinherited |
◆ getFramesPerVolume()
|
inherited |
Getter for the number of frames per volume, in 3D acquisition.
Definition at line 718 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getFramesPerVolume(), and usNetworkGrabber::m_acquisitionParameters.
◆ getImageDepth()
|
inherited |
Getter for image depth (meters).
Definition at line 723 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getImageDepth(), and usNetworkGrabber::m_acquisitionParameters.
◆ getImagingMode()
|
inherited |
Getter for imaging mode (0 : B-Mode, 12 : RF).
Definition at line 728 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getImagingMode(), and usNetworkGrabber::m_acquisitionParameters.
◆ getMotorActivation()
|
inherited |
Getter for motor activation : true to sweep the motor the motor during the acquisition, false to let it static.
Definition at line 705 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getActivateMotor(), and usNetworkGrabber::m_acquisitionParameters.
◆ getMotorPosition()
|
inherited |
Getter for a static motor position (in angle from the beginning position).
Definition at line 733 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getMotorPosition(), and usNetworkGrabber::m_acquisitionParameters.
◆ getPostScanHeigh()
|
inherited |
Getter for post-scan image height.
Definition at line 738 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getPostScanHeigh(), and usNetworkGrabber::m_acquisitionParameters.
◆ getPostScanMode()
|
inherited |
Getter for post-scan mode : true for post-scan, false for pre-scan.
Definition at line 743 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getPostScanMode(), and usNetworkGrabber::m_acquisitionParameters.
◆ getPostScanWidth()
|
inherited |
Getter for post-scan image width.
Definition at line 748 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getPostScanWidth(), and usNetworkGrabber::m_acquisitionParameters.
◆ getSamplingFrequency()
|
inherited |
Getter for samplingFrequency (Hz).
Definition at line 753 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getSamplingFrequency(), and usNetworkGrabber::m_acquisitionParameters.
◆ getSector()
|
inherited |
Getter for sector (percentage of the number of transducers to use).
Definition at line 758 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getSector(), and usNetworkGrabber::m_acquisitionParameters.
◆ getStepsPerFrame()
|
inherited |
Getter for steps between two sucessive frames (angle). See usAcquisitionParameters::usMotorSteps
Definition at line 710 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getSepsPerFrame(), and usNetworkGrabber::m_acquisitionParameters.
◆ getTransmitFrequency()
|
inherited |
Getter for transmitFrequency (Hz).
Definition at line 763 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getTransmitFrequency(), and usNetworkGrabber::m_acquisitionParameters.
◆ handleError
|
slotinherited |
Slot called if there is an error (or disruption) in the connection. Throws an exception and prints the error.
Definition at line 189 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_tcpSocket.
Referenced by usNetworkGrabber::processConnectionToServer().
◆ initAcquisition()
|
inherited |
Method called to init the ultrasonix station, by passing acquisition parameters. It is a blocking method : we wait the answer of the server to know if init was sucessfull.
- Parameters
-
header Contains acquisition parameters to set up for the acquisition.
- Returns
- Boolean to say if init was sucessfull (true) or not (false).
- Examples
- tutorial-elastography-2D-separate-displays.cpp, tutorial-elastography-2D.cpp, tutorial-elastography-3D-acquisition.cpp, tutorial-elastography-BMA-2D.cpp, tutorial-local-grabbing-elastography-display.cpp, tutorial-local-grabbing-pre-scan2D-display.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, tutorial-ultrasonix-qt-grabbing-RF.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp, tutorial-ultrasonix-servo-target-confidence.cpp, tutorial-ustk-virtual-server-RF2D.cpp, tutorial-ustk-virtual-server-RF3D.cpp, tutorial-ustk-virtual-server-postScan2D.cpp, tutorial-ustk-virtual-server-preScan2D.cpp, and tutorial-ustk-virtual-server-preScan3D.cpp.
Definition at line 206 of file usNetworkGrabber.cpp.
References usNetworkGrabber::endBlockingLoop(), usNetworkGrabber::usInitHeaderSent::headerId, usNetworkGrabber::usInitHeaderSent::imagingMode, usNetworkGrabber::m_isInit, usNetworkGrabber::m_isRunning, usNetworkGrabber::m_tcpSocket, usNetworkGrabber::m_updateParametersSucess, usNetworkGrabber::m_verbose, usNetworkGrabber::usInitHeaderSent::probeId, usNetworkGrabber::usInitHeaderSent::slotId, and usNetworkGrabber::stopAcquisition().
◆ initAcquisitionSlot
|
slotinherited |
Slot to call to init the ultrasonix station, by passing acquisition parameters. It is a blocking method : we wait the answer of the server to know if init was sucessfull.
- Returns
- Boolean to say if init was sucessfull (true) or not (false).
Definition at line 251 of file usNetworkGrabber.cpp.
References usNetworkGrabber::acquisitionInitialized(), usNetworkGrabber::endBlockingLoop(), usNetworkGrabber::usInitHeaderSent::headerId, usNetworkGrabber::usInitHeaderSent::imagingMode, usNetworkGrabber::m_isInit, usNetworkGrabber::m_isRunning, usNetworkGrabber::m_tcpSocket, usNetworkGrabber::m_updateParametersSucess, usNetworkGrabber::m_verbose, usNetworkGrabber::usInitHeaderSent::probeId, usNetworkGrabber::usInitHeaderSent::slotId, and usNetworkGrabber::stopAcquisition().
◆ isFirstFrameAvailable()
|
inline |
- Examples
- tutorial-elastography-2D-separate-displays.cpp, tutorial-elastography-2D.cpp, tutorial-elastography-BMA-2D.cpp, and tutorial-ustk-virtual-server-RF2D.cpp.
Definition at line 80 of file usNetworkGrabberRF2D.h.
◆ newFrame
|
signal |
Referenced by dataArrived().
◆ newFrameAvailable
|
signal |
Referenced by acquire(), and dataArrived().
◆ processConnectionToServer
|
slotinherited |
Method used to do all the process of the server connection.
Definition at line 129 of file usNetworkGrabber.cpp.
References usNetworkGrabber::connected(), usNetworkGrabber::disconnected(), usNetworkGrabber::endConnection(), usNetworkGrabber::handleError(), usNetworkGrabber::m_connect, usNetworkGrabber::m_ip, usNetworkGrabber::m_tcpSocket, and usNetworkGrabber::m_verbose.
Referenced by usNetworkGrabber::connectToServer().
◆ readAcquisitionParameters()
|
inherited |
Method to read all parameters comming from the server (in answer to an update). It fills the usNetworkGrabber attribute.
Definition at line 383 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, usNetworkGrabber::m_verbose, usAcquisitionParameters::setActivateMotor(), usAcquisitionParameters::setFramesPerVolume(), usAcquisitionParameters::setFramesPerVolumeMax(), usAcquisitionParameters::setImageDepth(), usAcquisitionParameters::setImageDepthMax(), usAcquisitionParameters::setImageDepthMin(), usAcquisitionParameters::setImagingMode(), usAcquisitionParameters::setImagingModeMax(), usAcquisitionParameters::setImagingModeMin(), usAcquisitionParameters::setMotorPosition(), usAcquisitionParameters::setMotorPositionMax(), usAcquisitionParameters::setMotorPositionMin(), usAcquisitionParameters::setPostScanHeigh(), usAcquisitionParameters::setPostScanMode(), usAcquisitionParameters::setPostScanWidth(), usAcquisitionParameters::setSamplingFrequency(), usAcquisitionParameters::setSamplingFrequencyMax(), usAcquisitionParameters::setSamplingFrequencyMin(), usAcquisitionParameters::setSector(), usAcquisitionParameters::setSectorMax(), usAcquisitionParameters::setSectorMin(), usAcquisitionParameters::setSepsPerFrame(), usAcquisitionParameters::setSepsPerFrameMax(), usAcquisitionParameters::setSepsPerFrameMin(), usAcquisitionParameters::setTransmitFrequency(), usAcquisitionParameters::setTransmitFrequencyMax(), usAcquisitionParameters::setTransmitFrequencyMin(), usAcquisitionParameters::US_ANGLE_PITCH_1, usAcquisitionParameters::US_ANGLE_PITCH_2, usAcquisitionParameters::US_ANGLE_PITCH_3, usAcquisitionParameters::US_ANGLE_PITCH_4, usAcquisitionParameters::US_ANGLE_PITCH_5, and usAcquisitionParameters::US_STATIC_MOTOR.
Referenced by usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), dataArrived(), and usNetworkGrabberRF3D::dataArrived().
◆ runAcquisition
|
slotinherited |
Sends the command to run the acquisition on the ultrasound station and start a new thread to run the data reception
- Examples
- tutorial-elastography-2D-separate-displays.cpp, tutorial-elastography-2D.cpp, tutorial-elastography-3D-acquisition.cpp, tutorial-elastography-BMA-2D.cpp, tutorial-local-grabbing-elastography-display.cpp, tutorial-local-grabbing-pre-scan2D-display.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, tutorial-ultrasonix-qt-grabbing-RF.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp, tutorial-ultrasonix-servo-target-confidence.cpp, tutorial-ustk-virtual-server-RF2D.cpp, tutorial-ustk-virtual-server-RF3D.cpp, tutorial-ustk-virtual-server-postScan2D.cpp, tutorial-ustk-virtual-server-preScan2D.cpp, and tutorial-ustk-virtual-server-preScan3D.cpp.
Definition at line 651 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_thread, and usNetworkGrabber::runAcquisitionSignal().
◆ runAcquisitionSignal
|
signalinherited |
◆ sendAcquisitionParameters()
|
inherited |
Method to send to the server the new acquisition parameters.
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp, and tutorial-ultrasonix-servo-target-confidence.cpp.
Definition at line 298 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_isRunning, usNetworkGrabber::m_updateParametersSucess, usNetworkGrabber::sendAcquisitionParametersSignal(), and usNetworkGrabber::stopAcquisition().
Referenced by usNetworkGrabber::center3DProbeMotor().
◆ sendAcquisitionParametersSignal
|
signalinherited |
Referenced by usNetworkGrabber::sendAcquisitionParameters(), and usNetworkGrabber::usNetworkGrabber().
◆ sendAcquisitionParametersSlot
|
protectedslotinherited |
Slot to send to the server the new acquisition parameters.
Definition at line 312 of file usNetworkGrabber.cpp.
References usNetworkGrabber::endBlockingLoop(), usAcquisitionParameters::getActivateMotor(), usAcquisitionParameters::getFramesPerVolume(), usAcquisitionParameters::getImageDepth(), usAcquisitionParameters::getImagingMode(), usAcquisitionParameters::getMotorPosition(), usAcquisitionParameters::getPostScanHeigh(), usAcquisitionParameters::getPostScanMode(), usAcquisitionParameters::getPostScanWidth(), usAcquisitionParameters::getSamplingFrequency(), usAcquisitionParameters::getSector(), usAcquisitionParameters::getSepsPerFrame(), usAcquisitionParameters::getTransmitFrequency(), usNetworkGrabber::m_acquisitionParameters, usNetworkGrabber::m_tcpSocket, usNetworkGrabber::m_updateParametersSucess, and usNetworkGrabber::m_verbose.
Referenced by usNetworkGrabber::usNetworkGrabber().
◆ sendRunSignal
|
protectedslotinherited |
Slot called to write on the socket the command run / stop.
- Parameters
-
run Boolean to run the acquisition (true), or stop it (false).
Definition at line 680 of file usNetworkGrabber.cpp.
References usNetworkGrabber::usRunControlHeaderSent::headerId, usNetworkGrabber::m_isRunning, usNetworkGrabber::m_tcpSocket, and usNetworkGrabber::usRunControlHeaderSent::run.
Referenced by usNetworkGrabber::usNetworkGrabber().
◆ serverUpdated
|
protectedslotinherited |
Slot called when we get the answer from the server to our reques to update aquisition parameters.
Definition at line 373 of file usNetworkGrabber.cpp.
References usNetworkGrabber::endBlockingLoop(), and usNetworkGrabber::m_updateParametersSucess.
Referenced by usNetworkGrabber::usNetworkGrabber().
◆ serverUpdateEnded
|
signalinherited |
◆ setFramesPerVolume()
|
inherited |
Setter for the number of frames per volume, in 3D acquisition.
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, and tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp.
Definition at line 558 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getFramesPerVolumeMax(), usAcquisitionParameters::getFramesPerVolumeMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setFramesPerVolume().
◆ setImageDepth()
|
inherited |
Setter for image depth (millimeters).
- Examples
- tutorial-ultrasonix-qt-grabbing-post-scan.cpp, and tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp.
Definition at line 571 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getImageDepthMax(), usAcquisitionParameters::getImageDepthMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setImageDepth().
◆ setImagingMode()
|
inherited |
Setter for imaging mode (0 : B-Mode, 12 : RF).
Definition at line 581 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getImagingModeMax(), usAcquisitionParameters::getImagingModeMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setImagingMode().
◆ setIPAddress()
|
inlineinherited |
- Examples
- tutorial-elastography-2D-separate-displays.cpp, tutorial-elastography-2D.cpp, tutorial-elastography-BMA-2D.cpp, tutorial-local-grabbing-elastography-display.cpp, tutorial-local-grabbing-pre-scan2D-display.cpp, tutorial-ustk-virtual-server-RF2D.cpp, tutorial-ustk-virtual-server-RF3D.cpp, tutorial-ustk-virtual-server-postScan2D.cpp, tutorial-ustk-virtual-server-preScan2D.cpp, and tutorial-ustk-virtual-server-preScan3D.cpp.
Definition at line 155 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::connectToServer().
◆ setMotorActivation()
|
inherited |
Setter for motor activation : true to sweep the motor the motor during the acquisition, false to let it static.
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, and tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp.
Definition at line 542 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setActivateMotor().
◆ setMotorPosition()
|
inherited |
Setter for a static motor position (in angle from the beginning position).
- Examples
- tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, and tutorial-ultrasonix-servo-target-confidence.cpp.
Definition at line 592 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getMotorPositionMax(), usAcquisitionParameters::getMotorPositionMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setMotorPosition().
Referenced by usNetworkGrabber::center3DProbeMotor().
◆ setPostScanHeigh()
|
inherited |
Setter for post-scan image height.
- Examples
- tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, and tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp.
Definition at line 603 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setPostScanHeigh().
◆ setPostScanMode()
|
inherited |
Setter for post-scan mode : true for post-scan, false for pre-scan.
- Examples
- tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, and tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp.
Definition at line 608 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setPostScanMode().
◆ setPostScanWidth()
|
inherited |
Setter for post-scan image width.
- Examples
- tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, and tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp.
Definition at line 613 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setPostScanWidth().
◆ setSamplingFrequency()
|
inherited |
Setter for samplingFrequency (Hz).
Definition at line 618 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getSamplingFrequencyMax(), usAcquisitionParameters::getSamplingFrequencyMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setSamplingFrequency().
◆ setSector()
|
inherited |
Setter for sector (percentage of the number of transducers to use).
Definition at line 629 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getSectorMax(), usAcquisitionParameters::getSectorMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setSector().
◆ setStepsPerFrame()
|
inherited |
Setter for steps between two sucessive frames (angle). See usAcquisitionParameters::usMotorSteps
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, and tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp.
Definition at line 550 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setSepsPerFrame().
◆ setTransmitFrequency()
|
inherited |
Setter for transmitFrequency (Hz).
Definition at line 639 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getTransmitFrequencyMax(), usAcquisitionParameters::getTransmitFrequencyMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setTransmitFrequency().
◆ setVerbose()
|
inlineinherited |
Definition at line 170 of file usNetworkGrabber.h.
◆ stopAcquisition
|
slotinherited |
Sends the command to stop the acquisition on the ulstrasound station. The server will stop to send data, but the grabber is still connected : you can then perform a runAcquisition() to tell the server to restart sending frames. The acquisition parameters will be kept.
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, tutorial-ultrasonix-qt-grabbing-RF.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, and tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp.
Definition at line 669 of file usNetworkGrabber.cpp.
References usNetworkGrabber::runAcquisitionSignal().
Referenced by usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), usNetworkGrabber::sendAcquisitionParameters(), and usNetworkGrabber::~usNetworkGrabber().
◆ stopRecording()
| void usNetworkGrabberRF2D::stopRecording | ( | ) |
Stop recording process.
Definition at line 289 of file usNetworkGrabberRF2D.cpp.
Member Data Documentation
◆ m_acquisitionParameters
|
protectedinherited |
Definition at line 211 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::getFramesPerVolume(), usNetworkGrabber::getImageDepth(), usNetworkGrabber::getImagingMode(), usNetworkGrabber::getMotorActivation(), usNetworkGrabber::getMotorPosition(), usNetworkGrabber::getPostScanHeigh(), usNetworkGrabber::getPostScanMode(), usNetworkGrabber::getPostScanWidth(), usNetworkGrabber::getSamplingFrequency(), usNetworkGrabber::getSector(), usNetworkGrabber::getStepsPerFrame(), usNetworkGrabber::getTransmitFrequency(), usNetworkGrabber::readAcquisitionParameters(), usNetworkGrabber::sendAcquisitionParametersSlot(), usNetworkGrabber::setFramesPerVolume(), usNetworkGrabber::setImageDepth(), usNetworkGrabber::setImagingMode(), usNetworkGrabber::setMotorActivation(), usNetworkGrabber::setMotorPosition(), usNetworkGrabber::setPostScanHeigh(), usNetworkGrabber::setPostScanMode(), usNetworkGrabber::setPostScanWidth(), usNetworkGrabber::setSamplingFrequency(), usNetworkGrabber::setSector(), usNetworkGrabber::setStepsPerFrame(), usNetworkGrabber::setTransmitFrequency(), and usNetworkGrabber::usNetworkGrabber().
◆ m_bytesLeftToRead
|
protectedinherited |
Definition at line 208 of file usNetworkGrabber.h.
Referenced by usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), dataArrived(), usNetworkGrabberRF3D::dataArrived(), and usNetworkGrabber::usNetworkGrabber().
◆ m_confirmHeader
|
protectedinherited |
Definition at line 217 of file usNetworkGrabber.h.
Referenced by usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), dataArrived(), usNetworkGrabberRF3D::dataArrived(), and usNetworkGrabber::usNetworkGrabber().
◆ m_connect
|
protectedinherited |
Definition at line 204 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::connectToServer(), usNetworkGrabber::disconnectFromServer(), usNetworkGrabber::processConnectionToServer(), and usNetworkGrabber::usNetworkGrabber().
◆ m_imageHeader
|
protectedinherited |
Definition at line 218 of file usNetworkGrabber.h.
Referenced by usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), dataArrived(), usNetworkGrabberRF3D::dataArrived(), and usNetworkGrabber::usNetworkGrabber().
◆ m_ip
|
protectedinherited |
Definition at line 205 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::processConnectionToServer(), and usNetworkGrabber::usNetworkGrabber().
◆ m_isInit
|
protectedinherited |
Definition at line 221 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), and usNetworkGrabber::usNetworkGrabber().
◆ m_isRunning
|
protectedinherited |
Definition at line 222 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), usNetworkGrabber::sendAcquisitionParameters(), usNetworkGrabber::sendRunSignal(), and usNetworkGrabber::usNetworkGrabber().
◆ m_tcpSocket
|
protectedinherited |
Definition at line 203 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::connected(), usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), dataArrived(), usNetworkGrabberRF3D::dataArrived(), usNetworkGrabber::disconnect(), usNetworkGrabber::disconnected(), usNetworkGrabber::disconnectFromServer(), usNetworkGrabber::handleError(), usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), usNetworkGrabber::processConnectionToServer(), usNetworkGrabber::sendAcquisitionParametersSlot(), usNetworkGrabber::sendRunSignal(), usNetworkGrabber::usNetworkGrabber(), usNetworkGrabberPostScan2D::usNetworkGrabberPostScan2D(), usNetworkGrabberPostScanBiPlan::usNetworkGrabberPostScanBiPlan(), usNetworkGrabberPreScan2D::usNetworkGrabberPreScan2D(), usNetworkGrabberPreScan3D::usNetworkGrabberPreScan3D(), usNetworkGrabberRF2D(), usNetworkGrabberRF3D::usNetworkGrabberRF3D(), and usNetworkGrabber::~usNetworkGrabber().
◆ m_thread
|
protectedinherited |
Definition at line 225 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::runAcquisition(), usNetworkGrabber::usNetworkGrabber(), and usNetworkGrabber::~usNetworkGrabber().
◆ m_updateParametersSucess
|
protectedinherited |
Definition at line 214 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), usNetworkGrabber::sendAcquisitionParameters(), usNetworkGrabber::sendAcquisitionParametersSlot(), and usNetworkGrabber::serverUpdated().
◆ m_verbose
|
protectedinherited |
Definition at line 200 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::connected(), usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), usNetworkGrabberPreScan2D::dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), dataArrived(), usNetworkGrabberRF3D::dataArrived(), usNetworkGrabber::disconnected(), usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), usNetworkGrabber::processConnectionToServer(), usNetworkGrabber::readAcquisitionParameters(), usNetworkGrabber::sendAcquisitionParametersSlot(), and usNetworkGrabber::usNetworkGrabber().