#include <visp3/ustk_grabber/usNetworkGrabberPreScan2D.h>
 Inheritance diagram for usNetworkGrabberPreScan2D:
Inheritance diagram for usNetworkGrabberPreScan2D:
Public Types | |
| enum | usDataPositionInBuffer { OUTPUT_FRAME_POSITION_IN_VEC = 0 , MOST_RECENT_FRAME_POSITION_IN_VEC = 1 , CURRENT_FILLED_FRAME_POSITION_IN_VEC = 2 } |
| enum | usVolumeField { ODD = 0 , EVEN = 1 , ODD_EVEN = 2 } |
Public Slots | |
| void | center3DProbeMotor () |
| void | connected () |
| void | connectToServer () |
| void | connectToServer (QHostAddress address) |
| void | disconnected () |
| void | disconnectFromServer () |
| void | handleError (QAbstractSocket::SocketError err) |
| void | initAcquisitionSlot (usNetworkGrabber::usInitHeaderSent header) |
| void | processConnectionToServer () |
| void | runAcquisition () |
| void | stopAcquisition () |
Signals | |
| void | newFrameAvailable () |
| void | newFrame (usImagePreScan2D< unsigned char > image) |
| void | serverUpdateEnded (bool success) |
| void | endBlockingLoop () |
| void | runAcquisitionSignal (bool run) |
| void | sendAcquisitionParametersSignal () |
| void | endConnection () |
| void | acquisitionInitialized (bool) |
Protected Slots | |
| void | serverUpdated (bool sucess) |
| void | sendRunSignal (bool run) |
| void | sendAcquisitionParametersSlot () |
Protected Member Functions | |
| void | invertRowsCols () |
Protected Attributes | |
| bool | m_verbose |
| QTcpSocket * | m_tcpSocket |
| bool | m_connect |
| std::string | m_ip |
| int | m_bytesLeftToRead |
| usAcquisitionParameters | m_acquisitionParameters |
| bool | m_updateParametersSucess |
| usInitHeaderConfirmation | m_confirmHeader |
| us::usImageHeader | m_imageHeader |
| bool | m_isInit |
| bool | m_isRunning |
| QThread * | m_thread |
Detailed Description
Specific class to grab pre-scan frames from the ultrasound station on the network.
The following figure details the network communication process and summarizes the steps to follow to acquire ultrasound images :
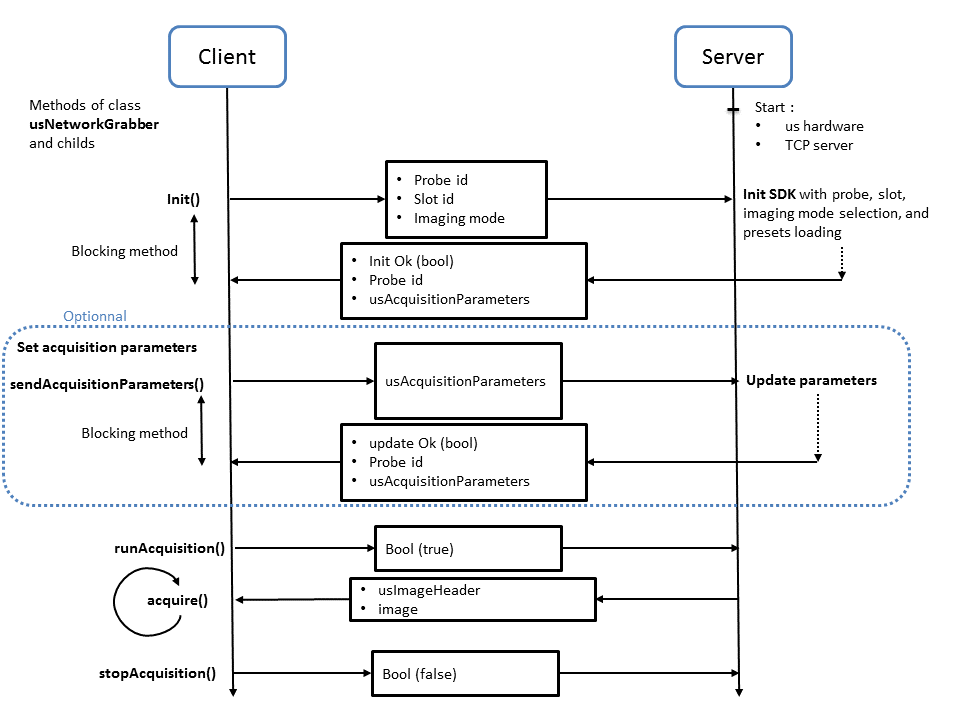
This grabber manages a buffer system to avoid multiple copy of the frames. The acquire() method returns you a pointer on a new frame, you can acess and modify the frame (it is thread-safe). Acquire() can be blocking, the behaviour depends on how often you call it :
- If you call acquire() faster than the frames are arriving on the network, it is blocking to wait next frame coming.
- If you call it slower you will loose frames, but you will get the last frame available.
- Examples
- tutorial-image-display-qtquickoverlay.cpp, tutorial-image-display-qtquickoverlayServoing.cpp, tutorial-local-grabbing-pre-scan2D-display.cpp, tutorial-robot-control-gui.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, tutorial-ultrasonix-servo-target-confidence.cpp, and tutorial-ustk-virtual-server-preScan2D.cpp.
Definition at line 67 of file usNetworkGrabberPreScan2D.h.
Member Enumeration Documentation
◆ usDataPositionInBuffer
|
inherited |
| Enumerator | |
|---|---|
| OUTPUT_FRAME_POSITION_IN_VEC | |
| MOST_RECENT_FRAME_POSITION_IN_VEC | |
| CURRENT_FILLED_FRAME_POSITION_IN_VEC | |
Definition at line 75 of file usNetworkGrabber.h.
◆ usVolumeField
|
inherited |
Enum to specify types of volumes to grab
| Enumerator | |
|---|---|
| ODD | Grab only odd volumes |
| EVEN | Grab only even volumes |
| ODD_EVEN | Grab every volumes |
Definition at line 82 of file usNetworkGrabber.h.
Constructor & Destructor Documentation
◆ usNetworkGrabberPreScan2D()
|
explicit |
Constructor. Inititializes the image, and manages Qt signal.
Definition at line 45 of file usNetworkGrabberPreScan2D.cpp.
References dataArrived(), and usNetworkGrabber::m_tcpSocket.
◆ ~usNetworkGrabberPreScan2D()
| usNetworkGrabberPreScan2D::~usNetworkGrabberPreScan2D | ( | ) |
Destructor.
Definition at line 65 of file usNetworkGrabberPreScan2D.cpp.
Member Function Documentation
◆ acquire()
| usFrameGrabbedInfo< usImagePreScan2D< unsigned char > > * usNetworkGrabberPreScan2D::acquire | ( | ) |
Method to get the last frame received. The grabber is designed to avoid data copy (it is why you get a pointer on the data).
- Note
- This method is designed to be thread-safe, you can call it from another thread.
- Returns
- Pointer to the last frame acquired.
- Examples
- tutorial-local-grabbing-pre-scan2D-display.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, tutorial-ultrasonix-servo-target-confidence.cpp, and tutorial-ustk-virtual-server-preScan2D.cpp.
Definition at line 256 of file usNetworkGrabberPreScan2D.cpp.
References usNetworkGrabber::MOST_RECENT_FRAME_POSITION_IN_VEC, newFrameAvailable(), and usNetworkGrabber::OUTPUT_FRAME_POSITION_IN_VEC.
◆ acquisitionInitialized
|
signalinherited |
Referenced by usNetworkGrabber::initAcquisitionSlot().
◆ activateRecording()
| void usNetworkGrabberPreScan2D::activateRecording | ( | std::string | path | ) |
Method to record the sequence received, to replay it later with the virtual server for example.
- Parameters
-
path The path where the sequence will be saved.
- Examples
- tutorial-image-display-qtquickoverlayServoing.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, and tutorial-ustk-virtual-server-preScan2D.cpp.
Definition at line 291 of file usNetworkGrabberPreScan2D.cpp.
References usMHDSequenceWriter::setSequenceDirectory().
◆ center3DProbeMotor
|
slotinherited |
Sets the motor position of 4DC7 probe to the middle.
Definition at line 768 of file usNetworkGrabber.cpp.
References usNetworkGrabber::sendAcquisitionParameters(), and usNetworkGrabber::setMotorPosition().
◆ connected
|
slotinherited |
Slot called when the grabber is connected to the server. Prints connection informations.
Definition at line 165 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_tcpSocket, and usNetworkGrabber::m_verbose.
Referenced by usNetworkGrabber::processConnectionToServer().
◆ connectToServer [1/2]
|
slotinherited |
Method used to connect to the server.
- Examples
- tutorial-elastography-2D-separate-displays.cpp, tutorial-elastography-2D.cpp, tutorial-elastography-3D-acquisition.cpp, tutorial-elastography-BMA-2D.cpp, tutorial-local-grabbing-elastography-display.cpp, tutorial-local-grabbing-pre-scan2D-display.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, tutorial-ultrasonix-qt-grabbing-RF.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp, tutorial-ultrasonix-servo-target-confidence.cpp, tutorial-ustk-virtual-server-RF2D.cpp, tutorial-ustk-virtual-server-RF3D.cpp, tutorial-ustk-virtual-server-postScan2D.cpp, tutorial-ustk-virtual-server-preScan2D.cpp, and tutorial-ustk-virtual-server-preScan3D.cpp.
Definition at line 96 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_connect, and usNetworkGrabber::processConnectionToServer().
◆ connectToServer [2/2]
|
slotinherited |
Method used to connect to the server.
Definition at line 105 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_connect, usNetworkGrabber::processConnectionToServer(), and usNetworkGrabber::setIPAddress().
◆ dataArrived()
|
virtual |
Slot called when data is coming on the network. Manages the type of data which is coming and read it. Emits newFrameArrived signal when a whole frame is available.
Implements usNetworkGrabber.
Definition at line 71 of file usNetworkGrabberPreScan2D.cpp.
References us::usImageHeader::anglePerFr, usNetworkGrabber::CURRENT_FILLED_FRAME_POSITION_IN_VEC, us::usImageHeader::dataLength, us::usImageHeader::dataRate, us::usImageHeader::frameCount, us::usImageHeader::frameHeight, us::usImageHeader::framesPerVolume, us::usImageHeader::frameWidth, usTransducerSettings::getDepth(), us::usImageHeader::headerId, usNetworkGrabber::usInitHeaderConfirmation::headerId, us::usImageHeader::imageDepth, us::usImageHeader::imageType, usNetworkGrabber::usInitHeaderConfirmation::initOk, invertRowsCols(), usNetworkGrabber::m_bytesLeftToRead, usNetworkGrabber::m_confirmHeader, usNetworkGrabber::m_imageHeader, usNetworkGrabber::m_tcpSocket, usNetworkGrabber::m_verbose, usNetworkGrabber::MOST_RECENT_FRAME_POSITION_IN_VEC, us::usImageHeader::motorRadius, us::usImageHeader::motorType, us::usImageHeader::pixelHeight, us::usImageHeader::pixelWidth, usNetworkGrabber::usInitHeaderConfirmation::probeId, usNetworkGrabber::readAcquisitionParameters(), usImagePreScan2D< Type >::resize(), us::usImageHeader::samplingFrequency, us::usImageHeader::scanLineNumber, us::usImageHeader::scanLinePitch, usNetworkGrabber::serverUpdateEnded(), usImagePreScanSettings::setAxialResolution(), usTransducerSettings::setDepth(), usFrameGrabbedInfo< Type >::setFrameCount(), usFrameGrabbedInfo< Type >::setFramesPerVolume(), usTransducerSettings::setSamplingFrequency(), usTransducerSettings::setScanLinePitch(), usFrameGrabbedInfo< Type >::setTimeStamp(), usTransducerSettings::setTransducerConvexity(), usTransducerSettings::setTransducerRadius(), usTransducerSettings::setTransmitFrequency(), us::usImageHeader::ss, us::usImageHeader::timeStamp, us::usImageHeader::transducerRadius, and us::usImageHeader::transmitFrequency.
Referenced by usNetworkGrabberPreScan2D().
◆ disconnect()
|
inherited |
Method to close the connection.
Definition at line 293 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_tcpSocket.
◆ disconnected
|
slotinherited |
Slot called when the grabber is disconnected from the server. Prints information, and closes socket.
Definition at line 179 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_tcpSocket, and usNetworkGrabber::m_verbose.
Referenced by usNetworkGrabber::disconnectFromServer(), and usNetworkGrabber::processConnectionToServer().
◆ disconnectFromServer
|
slotinherited |
Method used to disconnect from the server.
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-local-grabbing-elastography-display.cpp, and tutorial-local-grabbing-pre-scan2D-display.cpp.
Definition at line 115 of file usNetworkGrabber.cpp.
References usNetworkGrabber::disconnected(), usNetworkGrabber::endConnection(), usNetworkGrabber::m_connect, and usNetworkGrabber::m_tcpSocket.
◆ endBlockingLoop
|
signalinherited |
◆ endConnection
|
signalinherited |
◆ getFramesPerVolume()
|
inherited |
Getter for the number of frames per volume, in 3D acquisition.
Definition at line 718 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getFramesPerVolume(), and usNetworkGrabber::m_acquisitionParameters.
◆ getImageDepth()
|
inherited |
Getter for image depth (meters).
Definition at line 723 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getImageDepth(), and usNetworkGrabber::m_acquisitionParameters.
◆ getImagingMode()
|
inherited |
Getter for imaging mode (0 : B-Mode, 12 : RF).
Definition at line 728 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getImagingMode(), and usNetworkGrabber::m_acquisitionParameters.
◆ getMotorActivation()
|
inherited |
Getter for motor activation : true to sweep the motor the motor during the acquisition, false to let it static.
Definition at line 705 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getActivateMotor(), and usNetworkGrabber::m_acquisitionParameters.
◆ getMotorPosition()
|
inherited |
Getter for a static motor position (in angle from the beginning position).
Definition at line 733 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getMotorPosition(), and usNetworkGrabber::m_acquisitionParameters.
◆ getPostScanHeigh()
|
inherited |
Getter for post-scan image height.
Definition at line 738 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getPostScanHeigh(), and usNetworkGrabber::m_acquisitionParameters.
◆ getPostScanMode()
|
inherited |
Getter for post-scan mode : true for post-scan, false for pre-scan.
Definition at line 743 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getPostScanMode(), and usNetworkGrabber::m_acquisitionParameters.
◆ getPostScanWidth()
|
inherited |
Getter for post-scan image width.
Definition at line 748 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getPostScanWidth(), and usNetworkGrabber::m_acquisitionParameters.
◆ getSamplingFrequency()
|
inherited |
Getter for samplingFrequency (Hz).
Definition at line 753 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getSamplingFrequency(), and usNetworkGrabber::m_acquisitionParameters.
◆ getSector()
|
inherited |
Getter for sector (percentage of the number of transducers to use).
Definition at line 758 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getSector(), and usNetworkGrabber::m_acquisitionParameters.
◆ getStepsPerFrame()
|
inherited |
Getter for steps between two sucessive frames (angle). See usAcquisitionParameters::usMotorSteps
Definition at line 710 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getSepsPerFrame(), and usNetworkGrabber::m_acquisitionParameters.
◆ getTransmitFrequency()
|
inherited |
Getter for transmitFrequency (Hz).
Definition at line 763 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getTransmitFrequency(), and usNetworkGrabber::m_acquisitionParameters.
◆ handleError
|
slotinherited |
Slot called if there is an error (or disruption) in the connection. Throws an exception and prints the error.
Definition at line 189 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_tcpSocket.
Referenced by usNetworkGrabber::processConnectionToServer().
◆ initAcquisition()
|
inherited |
Method called to init the ultrasonix station, by passing acquisition parameters. It is a blocking method : we wait the answer of the server to know if init was sucessfull.
- Parameters
-
header Contains acquisition parameters to set up for the acquisition.
- Returns
- Boolean to say if init was sucessfull (true) or not (false).
- Examples
- tutorial-elastography-2D-separate-displays.cpp, tutorial-elastography-2D.cpp, tutorial-elastography-3D-acquisition.cpp, tutorial-elastography-BMA-2D.cpp, tutorial-local-grabbing-elastography-display.cpp, tutorial-local-grabbing-pre-scan2D-display.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, tutorial-ultrasonix-qt-grabbing-RF.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp, tutorial-ultrasonix-servo-target-confidence.cpp, tutorial-ustk-virtual-server-RF2D.cpp, tutorial-ustk-virtual-server-RF3D.cpp, tutorial-ustk-virtual-server-postScan2D.cpp, tutorial-ustk-virtual-server-preScan2D.cpp, and tutorial-ustk-virtual-server-preScan3D.cpp.
Definition at line 206 of file usNetworkGrabber.cpp.
References usNetworkGrabber::endBlockingLoop(), usNetworkGrabber::usInitHeaderSent::headerId, usNetworkGrabber::usInitHeaderSent::imagingMode, usNetworkGrabber::m_isInit, usNetworkGrabber::m_isRunning, usNetworkGrabber::m_tcpSocket, usNetworkGrabber::m_updateParametersSucess, usNetworkGrabber::m_verbose, usNetworkGrabber::usInitHeaderSent::probeId, usNetworkGrabber::usInitHeaderSent::slotId, and usNetworkGrabber::stopAcquisition().
◆ initAcquisitionSlot
|
slotinherited |
Slot to call to init the ultrasonix station, by passing acquisition parameters. It is a blocking method : we wait the answer of the server to know if init was sucessfull.
- Returns
- Boolean to say if init was sucessfull (true) or not (false).
Definition at line 251 of file usNetworkGrabber.cpp.
References usNetworkGrabber::acquisitionInitialized(), usNetworkGrabber::endBlockingLoop(), usNetworkGrabber::usInitHeaderSent::headerId, usNetworkGrabber::usInitHeaderSent::imagingMode, usNetworkGrabber::m_isInit, usNetworkGrabber::m_isRunning, usNetworkGrabber::m_tcpSocket, usNetworkGrabber::m_updateParametersSucess, usNetworkGrabber::m_verbose, usNetworkGrabber::usInitHeaderSent::probeId, usNetworkGrabber::usInitHeaderSent::slotId, and usNetworkGrabber::stopAcquisition().
◆ invertRowsCols()
|
protected |
Method to invert rows and columns in the image.
Definition at line 218 of file usNetworkGrabberPreScan2D.cpp.
References usNetworkGrabber::CURRENT_FILLED_FRAME_POSITION_IN_VEC, usFrameGrabbedInfo< Type >::getFrameCount(), usFrameGrabbedInfo< Type >::getFramesPerVolume(), usFrameGrabbedInfo< Type >::getTimeStamp(), usNetworkGrabber::MOST_RECENT_FRAME_POSITION_IN_VEC, newFrame(), newFrameAvailable(), and usMHDSequenceWriter::write().
Referenced by dataArrived().
◆ isFirstFrameAvailable()
|
inline |
- Examples
- tutorial-local-grabbing-pre-scan2D-display.cpp, tutorial-ultrasonix-servo-target-confidence.cpp, and tutorial-ustk-virtual-server-preScan2D.cpp.
Definition at line 80 of file usNetworkGrabberPreScan2D.h.
◆ newFrame
|
signal |
Referenced by invertRowsCols().
◆ newFrameAvailable
|
signal |
Referenced by acquire(), and invertRowsCols().
◆ processConnectionToServer
|
slotinherited |
Method used to do all the process of the server connection.
Definition at line 129 of file usNetworkGrabber.cpp.
References usNetworkGrabber::connected(), usNetworkGrabber::disconnected(), usNetworkGrabber::endConnection(), usNetworkGrabber::handleError(), usNetworkGrabber::m_connect, usNetworkGrabber::m_ip, usNetworkGrabber::m_tcpSocket, and usNetworkGrabber::m_verbose.
Referenced by usNetworkGrabber::connectToServer().
◆ readAcquisitionParameters()
|
inherited |
Method to read all parameters comming from the server (in answer to an update). It fills the usNetworkGrabber attribute.
Definition at line 383 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, usNetworkGrabber::m_verbose, usAcquisitionParameters::setActivateMotor(), usAcquisitionParameters::setFramesPerVolume(), usAcquisitionParameters::setFramesPerVolumeMax(), usAcquisitionParameters::setImageDepth(), usAcquisitionParameters::setImageDepthMax(), usAcquisitionParameters::setImageDepthMin(), usAcquisitionParameters::setImagingMode(), usAcquisitionParameters::setImagingModeMax(), usAcquisitionParameters::setImagingModeMin(), usAcquisitionParameters::setMotorPosition(), usAcquisitionParameters::setMotorPositionMax(), usAcquisitionParameters::setMotorPositionMin(), usAcquisitionParameters::setPostScanHeigh(), usAcquisitionParameters::setPostScanMode(), usAcquisitionParameters::setPostScanWidth(), usAcquisitionParameters::setSamplingFrequency(), usAcquisitionParameters::setSamplingFrequencyMax(), usAcquisitionParameters::setSamplingFrequencyMin(), usAcquisitionParameters::setSector(), usAcquisitionParameters::setSectorMax(), usAcquisitionParameters::setSectorMin(), usAcquisitionParameters::setSepsPerFrame(), usAcquisitionParameters::setSepsPerFrameMax(), usAcquisitionParameters::setSepsPerFrameMin(), usAcquisitionParameters::setTransmitFrequency(), usAcquisitionParameters::setTransmitFrequencyMax(), usAcquisitionParameters::setTransmitFrequencyMin(), usAcquisitionParameters::US_ANGLE_PITCH_1, usAcquisitionParameters::US_ANGLE_PITCH_2, usAcquisitionParameters::US_ANGLE_PITCH_3, usAcquisitionParameters::US_ANGLE_PITCH_4, usAcquisitionParameters::US_ANGLE_PITCH_5, and usAcquisitionParameters::US_STATIC_MOTOR.
Referenced by usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF2D::dataArrived(), and usNetworkGrabberRF3D::dataArrived().
◆ runAcquisition
|
slotinherited |
Sends the command to run the acquisition on the ultrasound station and start a new thread to run the data reception
- Examples
- tutorial-elastography-2D-separate-displays.cpp, tutorial-elastography-2D.cpp, tutorial-elastography-3D-acquisition.cpp, tutorial-elastography-BMA-2D.cpp, tutorial-local-grabbing-elastography-display.cpp, tutorial-local-grabbing-pre-scan2D-display.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, tutorial-ultrasonix-qt-grabbing-RF.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp, tutorial-ultrasonix-servo-target-confidence.cpp, tutorial-ustk-virtual-server-RF2D.cpp, tutorial-ustk-virtual-server-RF3D.cpp, tutorial-ustk-virtual-server-postScan2D.cpp, tutorial-ustk-virtual-server-preScan2D.cpp, and tutorial-ustk-virtual-server-preScan3D.cpp.
Definition at line 651 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_thread, and usNetworkGrabber::runAcquisitionSignal().
◆ runAcquisitionSignal
|
signalinherited |
◆ sendAcquisitionParameters()
|
inherited |
Method to send to the server the new acquisition parameters.
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp, and tutorial-ultrasonix-servo-target-confidence.cpp.
Definition at line 298 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_isRunning, usNetworkGrabber::m_updateParametersSucess, usNetworkGrabber::sendAcquisitionParametersSignal(), and usNetworkGrabber::stopAcquisition().
Referenced by usNetworkGrabber::center3DProbeMotor().
◆ sendAcquisitionParametersSignal
|
signalinherited |
Referenced by usNetworkGrabber::sendAcquisitionParameters(), and usNetworkGrabber::usNetworkGrabber().
◆ sendAcquisitionParametersSlot
|
protectedslotinherited |
Slot to send to the server the new acquisition parameters.
Definition at line 312 of file usNetworkGrabber.cpp.
References usNetworkGrabber::endBlockingLoop(), usAcquisitionParameters::getActivateMotor(), usAcquisitionParameters::getFramesPerVolume(), usAcquisitionParameters::getImageDepth(), usAcquisitionParameters::getImagingMode(), usAcquisitionParameters::getMotorPosition(), usAcquisitionParameters::getPostScanHeigh(), usAcquisitionParameters::getPostScanMode(), usAcquisitionParameters::getPostScanWidth(), usAcquisitionParameters::getSamplingFrequency(), usAcquisitionParameters::getSector(), usAcquisitionParameters::getSepsPerFrame(), usAcquisitionParameters::getTransmitFrequency(), usNetworkGrabber::m_acquisitionParameters, usNetworkGrabber::m_tcpSocket, usNetworkGrabber::m_updateParametersSucess, and usNetworkGrabber::m_verbose.
Referenced by usNetworkGrabber::usNetworkGrabber().
◆ sendRunSignal
|
protectedslotinherited |
Slot called to write on the socket the command run / stop.
- Parameters
-
run Boolean to run the acquisition (true), or stop it (false).
Definition at line 680 of file usNetworkGrabber.cpp.
References usNetworkGrabber::usRunControlHeaderSent::headerId, usNetworkGrabber::m_isRunning, usNetworkGrabber::m_tcpSocket, and usNetworkGrabber::usRunControlHeaderSent::run.
Referenced by usNetworkGrabber::usNetworkGrabber().
◆ serverUpdated
|
protectedslotinherited |
Slot called when we get the answer from the server to our reques to update aquisition parameters.
Definition at line 373 of file usNetworkGrabber.cpp.
References usNetworkGrabber::endBlockingLoop(), and usNetworkGrabber::m_updateParametersSucess.
Referenced by usNetworkGrabber::usNetworkGrabber().
◆ serverUpdateEnded
|
signalinherited |
◆ setFramesPerVolume()
|
inherited |
Setter for the number of frames per volume, in 3D acquisition.
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, and tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp.
Definition at line 558 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getFramesPerVolumeMax(), usAcquisitionParameters::getFramesPerVolumeMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setFramesPerVolume().
◆ setImageDepth()
|
inherited |
Setter for image depth (millimeters).
- Examples
- tutorial-ultrasonix-qt-grabbing-post-scan.cpp, and tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp.
Definition at line 571 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getImageDepthMax(), usAcquisitionParameters::getImageDepthMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setImageDepth().
◆ setImagingMode()
|
inherited |
Setter for imaging mode (0 : B-Mode, 12 : RF).
Definition at line 581 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getImagingModeMax(), usAcquisitionParameters::getImagingModeMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setImagingMode().
◆ setIPAddress()
|
inlineinherited |
- Examples
- tutorial-elastography-2D-separate-displays.cpp, tutorial-elastography-2D.cpp, tutorial-elastography-BMA-2D.cpp, tutorial-local-grabbing-elastography-display.cpp, tutorial-local-grabbing-pre-scan2D-display.cpp, tutorial-ustk-virtual-server-RF2D.cpp, tutorial-ustk-virtual-server-RF3D.cpp, tutorial-ustk-virtual-server-postScan2D.cpp, tutorial-ustk-virtual-server-preScan2D.cpp, and tutorial-ustk-virtual-server-preScan3D.cpp.
Definition at line 155 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::connectToServer().
◆ setMotorActivation()
|
inherited |
Setter for motor activation : true to sweep the motor the motor during the acquisition, false to let it static.
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, and tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp.
Definition at line 542 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setActivateMotor().
◆ setMotorPosition()
|
inherited |
Setter for a static motor position (in angle from the beginning position).
- Examples
- tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, and tutorial-ultrasonix-servo-target-confidence.cpp.
Definition at line 592 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getMotorPositionMax(), usAcquisitionParameters::getMotorPositionMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setMotorPosition().
Referenced by usNetworkGrabber::center3DProbeMotor().
◆ setPostScanHeigh()
|
inherited |
Setter for post-scan image height.
- Examples
- tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, and tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp.
Definition at line 603 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setPostScanHeigh().
◆ setPostScanMode()
|
inherited |
Setter for post-scan mode : true for post-scan, false for pre-scan.
- Examples
- tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, and tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp.
Definition at line 608 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setPostScanMode().
◆ setPostScanWidth()
|
inherited |
Setter for post-scan image width.
- Examples
- tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, and tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp.
Definition at line 613 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setPostScanWidth().
◆ setSamplingFrequency()
|
inherited |
Setter for samplingFrequency (Hz).
Definition at line 618 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getSamplingFrequencyMax(), usAcquisitionParameters::getSamplingFrequencyMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setSamplingFrequency().
◆ setSector()
|
inherited |
Setter for sector (percentage of the number of transducers to use).
Definition at line 629 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getSectorMax(), usAcquisitionParameters::getSectorMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setSector().
◆ setStepsPerFrame()
|
inherited |
Setter for steps between two sucessive frames (angle). See usAcquisitionParameters::usMotorSteps
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan3D-display.cpp, and tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp.
Definition at line 550 of file usNetworkGrabber.cpp.
References usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setSepsPerFrame().
◆ setTransmitFrequency()
|
inherited |
Setter for transmitFrequency (Hz).
Definition at line 639 of file usNetworkGrabber.cpp.
References usAcquisitionParameters::getTransmitFrequencyMax(), usAcquisitionParameters::getTransmitFrequencyMin(), usNetworkGrabber::m_acquisitionParameters, and usAcquisitionParameters::setTransmitFrequency().
◆ setVerbose()
|
inlineinherited |
Definition at line 170 of file usNetworkGrabber.h.
◆ stopAcquisition
|
slotinherited |
Sends the command to stop the acquisition on the ulstrasound station. The server will stop to send data, but the grabber is still connected : you can then perform a runAcquisition() to tell the server to restart sending frames. The acquisition parameters will be kept.
- Examples
- tutorial-elastography-3D-acquisition.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, tutorial-ultrasonix-qt-grabbing-RF.cpp, tutorial-ultrasonix-qt-grabbing-RF3D.cpp, tutorial-ultrasonix-qt-grabbing-post-scan-bi-plan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan.cpp, tutorial-ultrasonix-qt-grabbing-post-scan3D.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, and tutorial-ultrasonix-qt-grabbing-pre-scan3D.cpp.
Definition at line 669 of file usNetworkGrabber.cpp.
References usNetworkGrabber::runAcquisitionSignal().
Referenced by usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), usNetworkGrabber::sendAcquisitionParameters(), and usNetworkGrabber::~usNetworkGrabber().
◆ stopRecording()
| void usNetworkGrabberPreScan2D::stopRecording | ( | ) |
Stop recording process.
Definition at line 300 of file usNetworkGrabberPreScan2D.cpp.
◆ useVpDisplay()
| void usNetworkGrabberPreScan2D::useVpDisplay | ( | vpDisplay * | display | ) |
Method to link every image of the internal buffer to the vpDisplay you want to use. To call before any display operation using vpDisplay.
- Parameters
-
display The vpDisplay used to display your images.
- Examples
- tutorial-ultrasonix-qt-grabbing-pre-scan-confidence-control.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan-confidence.cpp, tutorial-ultrasonix-qt-grabbing-pre-scan.cpp, and tutorial-ustk-virtual-server-preScan2D.cpp.
Definition at line 281 of file usNetworkGrabberPreScan2D.cpp.
Member Data Documentation
◆ m_acquisitionParameters
|
protectedinherited |
Definition at line 211 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::getFramesPerVolume(), usNetworkGrabber::getImageDepth(), usNetworkGrabber::getImagingMode(), usNetworkGrabber::getMotorActivation(), usNetworkGrabber::getMotorPosition(), usNetworkGrabber::getPostScanHeigh(), usNetworkGrabber::getPostScanMode(), usNetworkGrabber::getPostScanWidth(), usNetworkGrabber::getSamplingFrequency(), usNetworkGrabber::getSector(), usNetworkGrabber::getStepsPerFrame(), usNetworkGrabber::getTransmitFrequency(), usNetworkGrabber::readAcquisitionParameters(), usNetworkGrabber::sendAcquisitionParametersSlot(), usNetworkGrabber::setFramesPerVolume(), usNetworkGrabber::setImageDepth(), usNetworkGrabber::setImagingMode(), usNetworkGrabber::setMotorActivation(), usNetworkGrabber::setMotorPosition(), usNetworkGrabber::setPostScanHeigh(), usNetworkGrabber::setPostScanMode(), usNetworkGrabber::setPostScanWidth(), usNetworkGrabber::setSamplingFrequency(), usNetworkGrabber::setSector(), usNetworkGrabber::setStepsPerFrame(), usNetworkGrabber::setTransmitFrequency(), and usNetworkGrabber::usNetworkGrabber().
◆ m_bytesLeftToRead
|
protectedinherited |
Definition at line 208 of file usNetworkGrabber.h.
Referenced by usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF2D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), and usNetworkGrabber::usNetworkGrabber().
◆ m_confirmHeader
|
protectedinherited |
Definition at line 217 of file usNetworkGrabber.h.
Referenced by usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF2D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), and usNetworkGrabber::usNetworkGrabber().
◆ m_connect
|
protectedinherited |
Definition at line 204 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::connectToServer(), usNetworkGrabber::disconnectFromServer(), usNetworkGrabber::processConnectionToServer(), and usNetworkGrabber::usNetworkGrabber().
◆ m_imageHeader
|
protectedinherited |
Definition at line 218 of file usNetworkGrabber.h.
Referenced by usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF2D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), and usNetworkGrabber::usNetworkGrabber().
◆ m_ip
|
protectedinherited |
Definition at line 205 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::processConnectionToServer(), and usNetworkGrabber::usNetworkGrabber().
◆ m_isInit
|
protectedinherited |
Definition at line 221 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), and usNetworkGrabber::usNetworkGrabber().
◆ m_isRunning
|
protectedinherited |
Definition at line 222 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), usNetworkGrabber::sendAcquisitionParameters(), usNetworkGrabber::sendRunSignal(), and usNetworkGrabber::usNetworkGrabber().
◆ m_tcpSocket
|
protectedinherited |
Definition at line 203 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::connected(), usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF2D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usNetworkGrabber::disconnect(), usNetworkGrabber::disconnected(), usNetworkGrabber::disconnectFromServer(), usNetworkGrabber::handleError(), usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), usNetworkGrabber::processConnectionToServer(), usNetworkGrabber::sendAcquisitionParametersSlot(), usNetworkGrabber::sendRunSignal(), usNetworkGrabber::usNetworkGrabber(), usNetworkGrabberPostScan2D::usNetworkGrabberPostScan2D(), usNetworkGrabberPostScanBiPlan::usNetworkGrabberPostScanBiPlan(), usNetworkGrabberPreScan2D(), usNetworkGrabberPreScan3D::usNetworkGrabberPreScan3D(), usNetworkGrabberRF2D::usNetworkGrabberRF2D(), usNetworkGrabberRF3D::usNetworkGrabberRF3D(), and usNetworkGrabber::~usNetworkGrabber().
◆ m_thread
|
protectedinherited |
Definition at line 225 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::runAcquisition(), usNetworkGrabber::usNetworkGrabber(), and usNetworkGrabber::~usNetworkGrabber().
◆ m_updateParametersSucess
|
protectedinherited |
Definition at line 214 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), usNetworkGrabber::sendAcquisitionParameters(), usNetworkGrabber::sendAcquisitionParametersSlot(), and usNetworkGrabber::serverUpdated().
◆ m_verbose
|
protectedinherited |
Definition at line 200 of file usNetworkGrabber.h.
Referenced by usNetworkGrabber::connected(), usNetworkGrabberPostScan2D::dataArrived(), usNetworkGrabberPostScanBiPlan::dataArrived(), dataArrived(), usNetworkGrabberPreScan3D::dataArrived(), usNetworkGrabberRF2D::dataArrived(), usNetworkGrabberRF3D::dataArrived(), usNetworkGrabber::disconnected(), usNetworkGrabber::initAcquisition(), usNetworkGrabber::initAcquisitionSlot(), usNetworkGrabber::processConnectionToServer(), usNetworkGrabber::readAcquisitionParameters(), usNetworkGrabber::sendAcquisitionParametersSlot(), and usNetworkGrabber::usNetworkGrabber().