#include <visp3/ustk_core/usMeterPixelConversion.h>
Static Public Member Functions | |
| static void | convert (const usImagePostScan2D< unsigned char > &image, const double &x, const double &y, double &u, double &v) |
| static void | convert (const usImagePostScan3D< unsigned char > &image, const double &x, const double &y, const double &z, double &u, double &v, double &w) |
Detailed Description
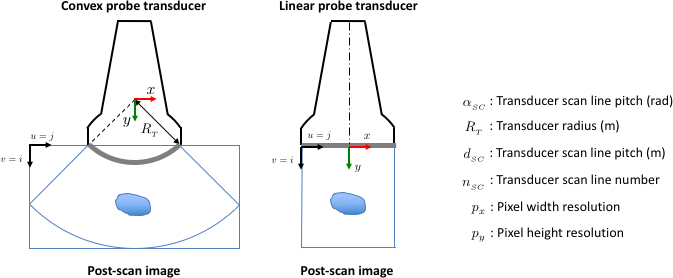
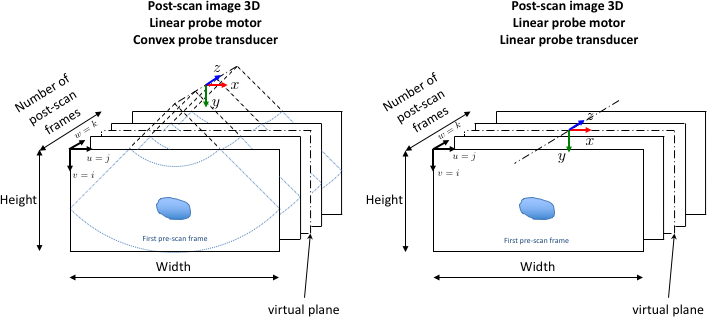
Conversion between a position in meters in the space and the equivalent pixel position in the ultrasound image.
- The following image shows the correspondance between frames (u,v) and (x,y) for post-scan 2D images: The following image shows the correspondance between frames (u,v,w) and (x,y,z) for post-scan 3D images with linear motor:
Definition at line 60 of file usMeterPixelConversion.h.
Member Function Documentation
◆ convert() [1/2]
|
static |
Conversion method for 2D ultrasound images.
- Parameters
-
[in] image 2D Post-scan image with transducer settings well filled. [in] x Position in meters along x axis to convert. [in] y Position in meters along y axis to convert. [out] u Converted position in pixels along x axis. [out] v Converted position in pixels along y axis.
Definition at line 49 of file usMeterPixelConversion.cpp.
References usImagePostScan2D< Type >::getHeightResolution(), usTransducerSettings::getScanLineNumber(), usTransducerSettings::getScanLinePitch(), usTransducerSettings::getTransducerRadius(), usImagePostScan2D< Type >::getWidthResolution(), and usTransducerSettings::isTransducerConvex().
◆ convert() [2/2]
|
static |
Conversion method for 3D ultrasound images.
- Parameters
-
[in] image 2D Post-scan image with voxels spacings, transducer settings and motor settings well filled. [in] x Position in meters along x axis to convert. [in] y Position in meters along y axis to convert. [in] z Position in meters along z axis to convert. [out] u Converted position in pixels along x axis. [out] v Converted position in pixels along y axis. [out] w Converted position in pixels along z axis.
Definition at line 77 of file usMeterPixelConversion.cpp.
References usImagePostScan3D< Type >::getElementSpacingX(), usImagePostScan3D< Type >::getElementSpacingY(), usImagePostScan3D< Type >::getElementSpacingZ(), usMotorSettings::getFrameNumber(), usMotorSettings::getFramePitch(), usMotorSettings::getMotorRadius(), usMotorSettings::getMotorType(), usImage3D< Type >::getNumberOfFrames(), usTransducerSettings::getScanLineNumber(), usTransducerSettings::getScanLinePitch(), usTransducerSettings::getTransducerRadius(), usImage3D< Type >::getWidth(), usTransducerSettings::isTransducerConvex(), usMotorSettings::LinearMotor, and usMotorSettings::TiltingMotor.