#include <visp3/ustk_core/usPreScanToPostScan2DConverter.h>
Public Member Functions | |
| usPreScanToPostScan2DConverter () | |
| ~usPreScanToPostScan2DConverter () | |
| void | convert (const usImagePreScan2D< unsigned char > &preScanImage, usImagePostScan2D< unsigned char > &postScanImage, double xResolution=0., double yResolution=0.) |
Protected Member Functions | |
| void | init (const usImagePostScan2D< unsigned char > &inputSettings, const int BModeSampleNumber, const int scanLineNumber) |
| void | init (const usTransducerSettings &inputSettings, const int BModeSampleNumber, const int scanLineNumber, const double xResolution, const double yResolution) |
Friends | |
| class | usRFToPostScan2DConverter |
Detailed Description
2D scan-converter
This class allows to convert 2D pre-scan ultrasound images to post-scan images. The convertion is applied in the convert() method.
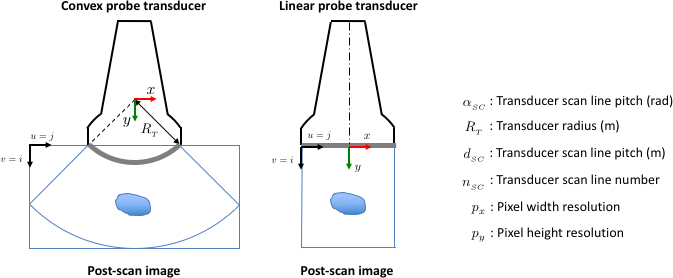
Considering the following usImagePreScan2D image (convex or linear) as input:
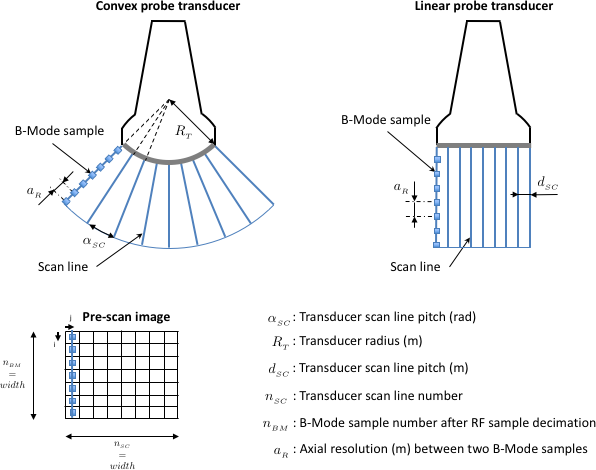
this class generates an usImagePostScan2D (convex or linear) as output:
Here is an example of how to use the converter, to build a post-scan image from a pre-scan image.
- Examples
- tutorial-servo-target-confidence.cpp, tutorial-sonosite-confidence-control.cpp, tutorial-sonosite-confidence-map.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, and tutorial-ultrasonix-servo-target-confidence.cpp.
Definition at line 92 of file usPreScanToPostScan2DConverter.h.
Constructor & Destructor Documentation
◆ usPreScanToPostScan2DConverter()
| usPreScanToPostScan2DConverter::usPreScanToPostScan2DConverter | ( | ) |
Definition at line 36 of file usPreScanToPostScan2DConverter.cpp.
◆ ~usPreScanToPostScan2DConverter()
| usPreScanToPostScan2DConverter::~usPreScanToPostScan2DConverter | ( | ) |
Definition at line 38 of file usPreScanToPostScan2DConverter.cpp.
Member Function Documentation
◆ convert()
| void usPreScanToPostScan2DConverter::convert | ( | const usImagePreScan2D< unsigned char > & | preScanImage, |
| usImagePostScan2D< unsigned char > & | postScanImage, | ||
| double | xResolution = 0., |
||
| double | yResolution = 0. |
||
| ) |
Run the scan-converter.
- Parameters
-
[in,out] postScanImage Post-scan image : result of the scan conversion. [in] preScanImage Pre-scan image to convert. [in] xResolution Size of a pixel along x axis in post-scan image built (optionnal). [in] yResolution Size of a pixel along y axis in post-scan image built (optionnal).
- Examples
- tutorial-servo-target-confidence.cpp, tutorial-sonosite-confidence-control.cpp, tutorial-sonosite-confidence-map.cpp, tutorial-ultrasonix-qt-grabbing-RF-scan-conversion.cpp, and tutorial-ultrasonix-servo-target-confidence.cpp.
Definition at line 194 of file usPreScanToPostScan2DConverter.cpp.
References usImagePreScanSettings::getAxialResolution(), usImagePreScan2D< Type >::getBModeSampleNumber(), usTransducerSettings::getDepth(), usTransducerSettings::getScanLineNumber(), usTransducerSettings::getScanLinePitch(), usTransducerSettings::getTransducerRadius(), init(), usTransducerSettings::isTransducerConvex(), usTransducerSettings::setDepth(), usImagePostScan2D< Type >::setHeightResolution(), usTransducerSettings::setScanLineNumber(), usTransducerSettings::setScanLinePitch(), usTransducerSettings::setTransducerConvexity(), usTransducerSettings::setTransducerRadius(), and usImagePostScan2D< Type >::setWidthResolution().
Referenced by usRFToPostScan2DConverter::convert(), usImageDisplayWidget::updateFrame(), usImageDisplayWidgetQmlOverlayServoing::updateFrame(), and usImageDisplayWidgetRobotControl::updateFrame().
◆ init() [1/2]
|
protected |
Initialize the scan-converter.
- Parameters
-
inputSettings Post-scan settings : transducer radius, pitch, depth, and resolutions. BModeSampleNumber Number of samples along a scan line : height of the pre-scan image to convert. scanLineNumber Number of scan lines : width of the pre-scan image to convert.
Definition at line 47 of file usPreScanToPostScan2DConverter.cpp.
References usTransducerSettings::getDepth(), usTransducerSettings::getFieldOfView(), usImagePostScan2D< Type >::getHeightResolution(), usTransducerSettings::getScanLinePitch(), usTransducerSettings::getTransducerRadius(), usImagePostScan2D< Type >::getWidthResolution(), and usTransducerSettings::isTransducerConvex().
Referenced by convert(), and usRFToPostScan2DConverter::setConversionParameters().
◆ init() [2/2]
|
protected |
Initialize the scan-converter.
- Parameters
-
inputSettings Post-scan settings : transducer radius, pitch, depth, and resolutions. BModeSampleNumber Number of samples along a scan line : height of the pre-scan image to convert. scanLineNumber Number of scan lines : width of the pre-scan image to convert. xResolution Size of a pixel in x direction of the post scan image built. yResolution Size of a pixel in y direction of the post scan image built.
Definition at line 122 of file usPreScanToPostScan2DConverter.cpp.
References usTransducerSettings::getDepth(), usTransducerSettings::getFieldOfView(), usTransducerSettings::getScanLinePitch(), usTransducerSettings::getTransducerRadius(), and usTransducerSettings::isTransducerConvex().
Friends And Related Function Documentation
◆ usRFToPostScan2DConverter
|
friend |
Definition at line 94 of file usPreScanToPostScan2DConverter.h.